Ακριβείς λεπτομέρειες:
Συμβουλές
1. Το INAV, DSHOT δεν μπορεί να λειτουργήσει σε S3, S5, S7 λόγω σύγκρουσης DMA, παρακαλούμε χρησιμοποιήστε ONESHOT ή MULTISHOT και βαθμονομήστε την περιοχή PWM ESC.
2. BetaFlight, ορίστε dshot_bitbang = ON όταν χρησιμοποιείτε X6 και X8 DSHOT.
3. BetaFlight, Το όνομα στόχου μετονομάστηκε σε MatekF405TE_SD
4. ArduPilot, ορίστε το LOG_BACKEND_TYPE = 1 (Αρχείο) για αρχειοθέτηση στην κάρτα SD
Προδιαγραφές
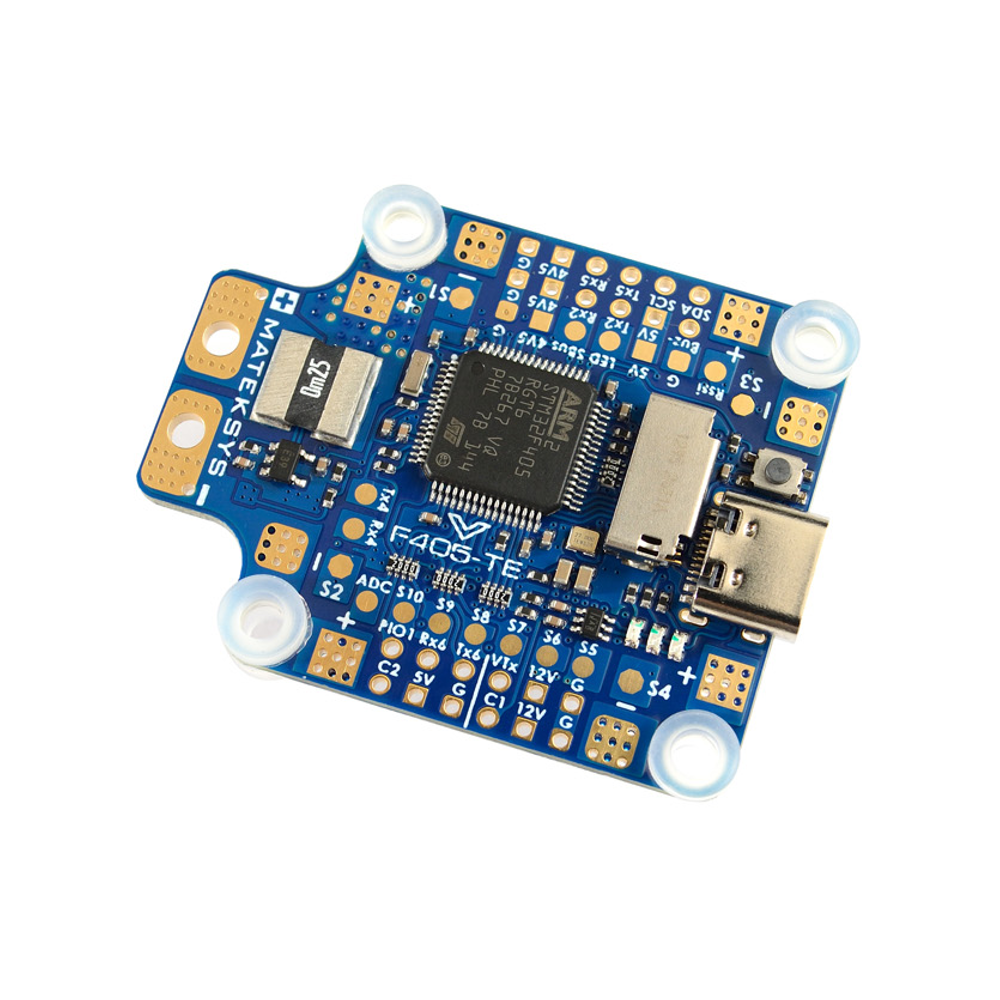
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: Θέση για κάρτα MicroSD (SPI)
6x UART, επιλογή 1x Softserial_Tx (INAV/BF)
11 εξόδους PWM (8 συμβατές με Dshot για BF / ArduPilot)
1x I2C
4x ADC (VBAT, Τρέχον, RSSI, Ταχύτητα αέρα)
1x ανταλλακτικό PINIO
4x μεμονωμένες θύρες τροφοδοσίας/σήματος ESC
1x Ομάδα πλήκτρων G/S1/S2/S3/S4 για το 4in1 ESC Σήμα/ΓΗ
Ενσωματωμένος αντιστροφέας σε UART2-RX για είσοδο SBUS
Εναλλάξιμη διπλή είσοδος κάμερας
Προδιαγραφές PDB
9 ~ 36V (3 ~ 8S LiPo)
ΚΠΔ: 4x 35A (Μέγ.4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3,3 V: 200 mA
Τρέχων αισθητήρας: 220A, 3.3V ADC (κλίμακα INAV/BF 150, ArduPilot 66.7 A/V)
Διαίρεση Τάσης Μπαταρίας 1K:20K (κλίμακα INAV 2100, κλίμακα BF 210, πολλαπλασιαστής τάσης BATT_VOLT_MULT ArduPilot 21.0)
Λογισμικό
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Φυσική
Τοποθέτηση: 30,5 x 30,5mm,Φ4mm με Grommets Φ3mm
Διαστάσεις: 36 x 46 χιλ.
Βάρος: 10γρ
Συμπεριλαμβάνοντας
1x F405-TE
6x σιλικόνης grommets M4 σε M3
1x Rubycon ZLH 35V/470uF (χαμηλή ESR)
Διάταξη και Συνδεσμολογία

Χαρτογράφηση INAV/BF
Χαρτογράφηση ArduPilot
Frsky Smartport Τηλεμετρία
μη αντιστραμμένο (θαμμένο) σήμα S.Port
οποιαδήποτε ελεύθερη Uart_TX
SERIALx_BAUD 57
ΕΠΙΛΟΓΕΣ_SERIALx 7
SERIALx_PROTOCOL 4 ή 10 (για yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (λειτουργία δημοσκόπησης)
Ρελέ (PINIO)
PINIO1, πλακέτα PIO1, χαμηλό επίπεδο από προεπιλογή
PINIO2, εναλλαγή κάμερας, C1 ΕΝΕΡΓΟΠΟΙΗΜΕΝΟ από προεπιλογή
GPIOs
PA4 PINIO1 OUTPUT GPIO(81) LOW //PIO1 pad
PB5 PINIO2 OUTPUT GPIO(82) LOW //διακόπτης κάμερας
# RCx_OPTION: επιλογή εισόδου RC
28 Ενεργοποίηση/Απενεργοποίηση Ρελέ
34 Ρελέ 2 Ενεργοποίηση/Απενεργοποίηση
35 Ρελέ3 Ενεργοποίηση/Απενεργοποίηση
36 Ρελέ 4 Ενεργοποίηση/Απενεργοποίηση
παρ. π.χ.
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Ενεργοποίηση/Απενεργοποίηση ρελέ, Χρησιμοποίησε το CH7 του πομπού για να ελέγχεις το επίπεδο ΧΝΧ1 χαμηλό/ψηλό
RELAY_PIN2 82 //Αλλαγή κάμερας GPIO
RC8_OPTION 34 //Ενεργοποίηση/Απενεργοποίηση Ρελέ2, Χρήση CH8 του Πομπού για έλεγχο υψηλού/χαμηλού επιπέδου στο pad PB5
Η διαμορφωμένη λειτουργία θα ενεργοποιηθεί όταν η τιμή pwm του βοηθητικού διακόπτη γίνει μεγαλύτερη από 1800. Θα απενεργοποιηθεί όταν η τιμή πέσει κάτω από 1200.
Ελέγξτε την τιμή pwm που στέλνεται από τον πομπό όταν το διακόπτη είναι υψηλός και χαμηλός χρησιμοποιώντας την οθόνη Καλιμπράρισμα Ραδιοφώνου στην Αρχική Ρύθμιση >> Υποχρεωτικά Υλικά >> Ραδιοφωνική Βαθμονόμηση του Mission Planner. Εάν δεν ανεβαίνει πάνω από 1800 ή κατέβει κάτω από 1200, είναι καλύτερο να ρυθμίσετε τα άκρα του σερβοκινητήρα στον πομπό.
Συμβουλές
- Το F405-TE έχει προ-φορτωμένο το INAV fw για έλεγχο ποιότητας
- ρυθμίστε το ρυθμό PWM ESC BLHeli32 σε 48KHz ή ανώτερο στο BLHeliSuite
ArduPilot
ArduPilot fw, προειδοποίηση "Εσωτερικά σφάλματα 0x4000 l:213 spi_fail", παρακαλώ ρυθμίστε το LOG_BACKEND_TYPE = 1 (Αρχείο) για καταγραφή στην κάρτα SD.
Λήψη του firmware ArduPilot από το ΕΔΩ.
INAV
Με το firmware INAV, το DSHOT δεν μπορεί να λειτουργήσει σε S3, S5, S7 εξαιτίας σύγκρουσης DMA, παρακαλούμε χρησιμοποιήστε ONESHOT ή MULTISHOT και βαθμονομήστε την περιοχή των PWM ESC.
Κατεβάστε το firmware INAV 4.1.x από τον ιστότοπο της Matck. INAV5.x ή νεότερο απευθείας από τον INAV configurator.
BetaFlight
Εάν χρησιμοποιείτε παθητική βομβητήρι ανά 5V, πληκτρολογήστε «set beeper_frequency = 2500» στο CLI
Ο στόχος MATEKF405TE_SD υποστηρίχθηκε από την έκδοση BF4.4.
ορίστε dshot_bitbang = ON όταν χρησιμοποιείτε DSHOT στα X6 και X8,
Μπορείτε να κατεβάσετε το BF 4.3 απευθείας από τον συνδυαστή BF, το BF 4.2.x από Εδώ.
Ο βαρόμετρος SPL06-001 δεν υποστηρίζεται από το Betaflight.