Kesin ayrıntılar:
Özellikler:
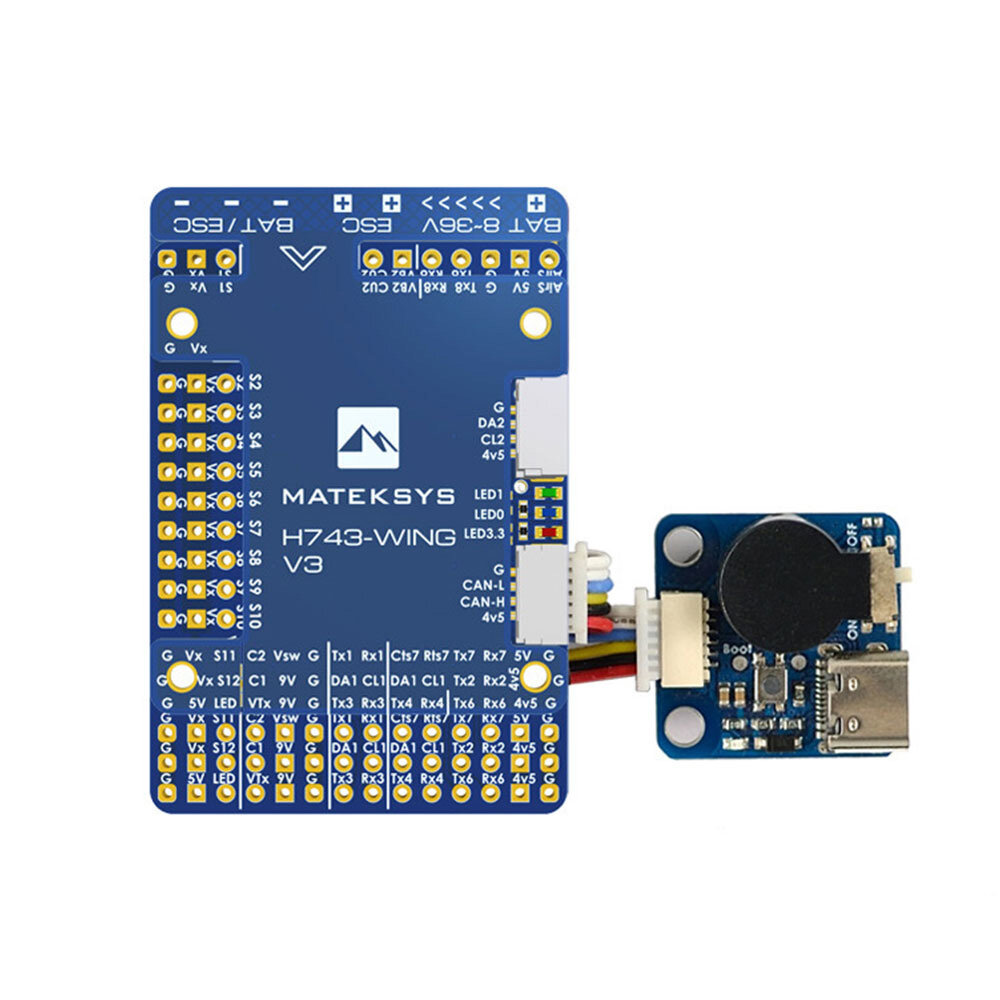
Marka Adı: Matek
Öğe Adı: H743-WING V3
Hızlı Başlangıç Kılavuzu Burayı tıklayın
FC Özellikleri:
MCU: STM32H743VIT6, 480MHz, 1MB RAM, 2MB Flash
IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD kart yuvası (SDIO)
Dahili ters çevirme ile 7x Uarts (1,2,3,4,6,7,8).n13x PWM çıkışları ("LED" yastığı dahil)n2x I2Cn1x CANn6x ADC (VBAT,akım,RSSI,Analog AirSpeed,VB2,CU2)nFC STATUS için 3 LED (Mavi,Kırmızı) ve 3.3V gösterge (Kırmızı)n1x SPI3 ara kesme
USB / Beep Uzatıcı, Type-C (USB2.0) ile
Çift Kamera Girişleri anahtarı
Kamera/VTX güç anahtarı için 5V/9V(12V)
Yüksek hassasiyetli Akım Algılama (sürekli 90A, tepe 220A)
Pil Gerilimi Sensörü: 1K:10K (INAV'da Ölçek 1100, ArduPilot'ta BATT_VOLT_MULT 11.0)
ADC VB2 gerilim bölücü: 1K:20K
ADC AirSpeed gerilim bölücü: 20K:20K
Statik güç 160mA@5V
FC Firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Yazılım Burayı tıklayın
PDB
Giriş gerilim aralığı: 8~36V (3~8S LiPo) ile TVS kveyauması
2x ESC güç pad'i
Mevcut Senör: 220A, 3.3V ADC (INAV'da 150 ölçeği, ArduPilot'ta 66.7 A/V)
Sense direnci: 90A sürekli, 220A zirve.
BEC 5V çıkış
Uçuş kontrolcüsü, Alıcı, OSD, Kamera, Buzzer, 2812 LED Şerit, GPS modülü, Hava hızı için tasarlanmıştır
Çıkış 5.15 +/- 0.1V DC
Sürekli akım 2 Amper, 3A Pik
BEC 9V /12V çıkışı
Video Verici, Kamera, Gimbal vb. için tasarlanmıştır.
Sürekli akım 2 Amper, 3A Tepe
12V seçeneğiyle Jumper pad
BEC Vx çıkışı
Servolar için tasarlanmış
Gerilim ayarlanabilir, varsayılan 5V, jumper ile 6V veya 7.2V
Sürekli akım 8 Amper, 10A Pik
BEC 3.3V çıkışı
Doğrusal Regülatör
Sürekli akım: 200mA
Fiziksel
Montaj: 30,5 x 30,5mm, Φ4mm ile Contalar Φ3mm
Boyutlar: 54 x 36 x 13 mm
Ağırlık: USB uzatıcı ile birlikte 30g
Paket Dahil
1x H743-WING
1x USB (Type-C)/Beep (Pasif hızlandırıcı) Uzatıcı
USB uzatıcı için 1x 20cm JST-SH-6P'den JST-SH-6P kablosu.
CAN ve I2C pveyatu için 2x 20cm JST-GH-4P to JST-GH-4P kablosu
1 adet Rubycon ZLH 35V 470uF kondansatör
Dupont 2.54 pimleri (Levha lehimlenmeden gönderilir)
INAV Haritalama

RC GİRİŞİ
Varsayılan olarak bir zamanlayıcı girişine eşlenen Rx6 pini, CRSF dışında tüm ArduPilot desteklenen alıcı protokoller için kullanılabilir ve gerçek bir UART bağlantısı gerektirir. Ancak, telemetriyi içeren İki yönlü protokoller olan SRXL2 ve FPveyat, bu şekilde bağlandığında sadece RC sağlar.
CRSF ve gömülü telemetriyi Fpveyat,CRSF ve SRXL2 alıcılarında kullanılabilir hale getirmek için,Rx6 pimi,iki yönlü sistemler için gerçek UART RX pini olarak kullanılmak üzere ayarlanarak da yapılandırılabilir. BRD_ALT_CONFIG SERIAL7 bağlantı noktasının RX giriş pimine "1" olarak.
Bu seçenekle birlikte, SERIAL7_PROTOCOL 23" olarak ayarlanmalı ve:
PPM desteklenmiyveya.
* SBUS/DSM/SRXL Rx6 pime bağlanır, ancak SBUS bunu gerektirir SERIAL7_SEÇENEKLERİ 3" olarak ayarlanacak.
* FPveyat, Tx6'ya bağlantı gerektirir ve SERIAL7_SEÇENEKLERİ 7" olarak ayarlanacak. Telemetri çalışmazsa, ayarlamayı deneyin SERIAL7_SEÇENEKLERİ = 135.
* CRSF ayrıca, Rx6'ya ek olarak bir Tx6 bağlantısı gerektirir ve otomatik olarak telemetri sağlar. Ayarla SERIAL7_SEÇENEKLERİ 0"'a.
* SRXL2, bir bağlantı gerektirir ve Tx6'ya otomatik olarak telemetri sağlar. Ayarla SERIAL7_SEÇENEKLERİ 4" 'e kadar.
ArduPilot'ta herhangi bir UART da RC sistemi bağlantıları için kullanılabilir ve PPM hariç tüm protokollerle uyumludur. Bakın Radyo Kontrol Sistemleri detaylar için.
ArduPilot Rölesi (PINIO)
Kamera-1 ve Vsw varsayılan olarak açık
2 kamera da aynı video fveyamatına (hem PAL hem de NTSC) ayarlandığından emin olun.
# GPIO'lar
PD10 PINIO1 OUTPUT GPIO(81) //Vsw pad güç anahtarı
- PD11 PINIO2 ÇIKIŞ GPIO(82) //Kamera anahtarı
# RCx_SEÇENEK: RC giriş seçeneği
- 28 Röle Açık/Kapalı
- 34 Röle2 Aç/Kapat
- 35 Röle3 Açık/Kapalı
- 36 Röle 4 Aç/Kapat
örneğin
- RELAY_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //Röle Açık/Kapalı, Vsw'yi değiştirmek için Vericinin CH7'sini kullan
RELAY_PIN2 82 //Kamera anahtarı GPIO
RC8_SEÇENEK 34 //Röle2 Açık/Kapalı, Kamerayı açmak için Vericinin CH8'i kullanın
veya
RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Röle3 Açık/Kapalı, Vsw'yi değiştirmek için Verici'nin CH9'unu kullanın
- RELAY_PIN4 82 //Kamera anahtarı GPIO
RC10_SEÇENEK 36 //Röle4 Açık/Kapalı, Kamerayı değiştirmek için Verici'nin CH10'unu kullanın
Yedek anahtarın pwm değeri 1800'den yüksek olduğunda yapılandırılan özellik tetiklenir. Değer 1200'in altına düştüğünde etkisiz hale getirilir.
Vericiden PWM değeri yüksek ve düşük anahtar konumundayken gönderilen PWM değerini kontrol edin. Eğer 1800'den daha yüksek veya 1200'den daha düşük bir değere ulaşmazsa, vericinin servo uç noktalarını ayarlamak en iyisi olacaktır. Bunun için Misyon Planlayıcının İlk Kurulum >> Zveyaunlu Donanım >> Radyo Kalibrasyonu ekranını kullanabilirsiniz.
İpuçları ve Notlar
ArduPilot
* H743-WING-V2/V3 üzerinde akım sensörü aralığı 220A'dır, ayarladığınızdan emin olun BATT_AMP_PERVLT 66.7'e
* ArduPilot 4.1 veya üstü için INS_ENABLE_MASK değerini 7 veya varsayılan 127 olarak ayarlayın.
* Lütfen indirin uçak 4.2.0 veya daha yeniH743-WING-V3 için ArduPilot yazılımı
MCU'yu silmek ve firmware yüklemek için STM32CubeProgrammer kullanılması önerilir. Bu blogu kontrol edin http://www.mateksys.com/?p=6905
INAV
* H743-WING-V2/V3 üzerinde akım sensörü aralığı 220A'dır, ayarladığınızdan emin olun 150'ye kadar geçerli sayaç ölçeği
* H743-WING-V3, yapılandırmadan indirilen INAV4.1 tarafından desteklenmez. Lütfen indirin inav_4.1.0_MATEKH743_42688 web sitesinden
INAV5.0 ile başlayarak, aynı firmware'i paylaşacaklar.
Diğerleri
Kullandığınız ESC'lerde yeterli entegreli kapasitör bulunmuyveyasa, ESC gürültüsünü azaltmak için düşük ESR elektrolitik kondansatöre ihtiyaç vardır.