รายละเอียดที่แม่นยำ:
ข้อมูลเฉพาะ:
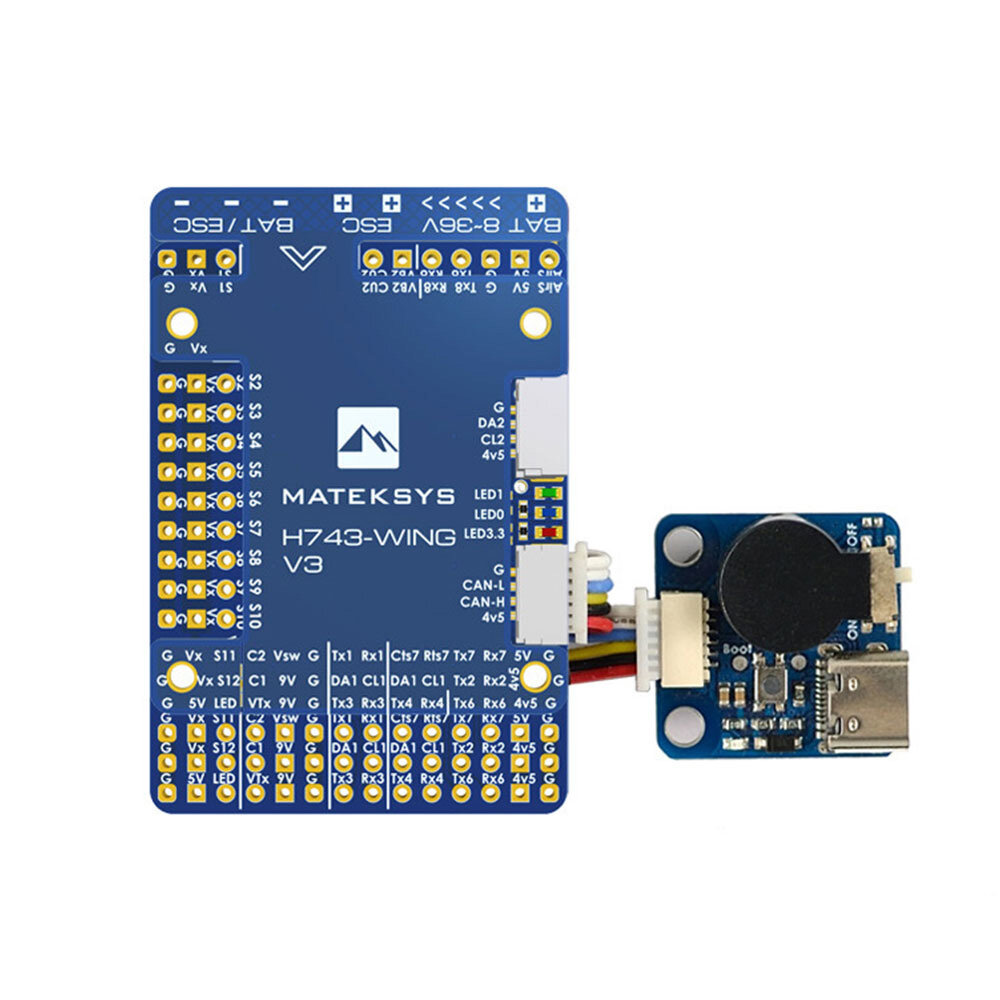
ชื่อแบรนด์: มาเท็ก
ชื่อสินค้า: H743-WING V3
คู่มือเริ่มต้นอย่างรวดเร็ว คลิกที่นี่
คุณสมบัติของ FC:
MCU: STM32H743VIT6, 480MHz, 1MB RAM, 2MB Flash
IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: ช่องการ์ด MicroSD (SDIO)
7x Uarts (1,2,3,4,6,7,8) ด้วยการกลับค่าภายในn13x PWM outputs (รวมถึง "LED" pad)n2x I2Cn1x CANn6x ADC (VBAT,กระแส,RSSI,Analog AirSpeed,VB2,CU2)n3x LEDs สำหรับสถานะ FC (สีน้ำเงิน,สีแดง) และตัวบ่งชี้ 3.3V (สีแดง)n1x SPI3 ออกพัก
ตัวขยาย USB / Beep ด้วย Type-C (USB2.0)
สลับการป้อนกล้องคู่
สวิตช์พลังงาน 5V/9V(12V) สำหรับกล้อง/VTX
ตรวจสอบกระแสไฟฟ้าที่สูง (90A ต่อเนื่อง, 220A สูงสุด)
เซ็นเซอร์แรงดันแบตเตอรี่: 1K:10K (สเกล 1100 ใน INAV, BATT_VOLT_MULT 11.0 ใน อาร์ดูไพล็อต)
เครื่องหมายแบ่งแรงดัน ADC VB2: 1K:20K
เครื่องหมายแบ่งแรงดัน ADC AirSpeed: 20K:20K
กำลังไฟสถิต 160mA@5V
ซอฟต์แวร์ FC
อาร์ดูไพล็อต(ChiBiOS): MATEKH743
INAV: MATEKH743
เฟิร์มแวร์ คลิกที่นี่
PDB
ช่วงแรงดันเข้า: 8~36V (3~8S LiPo) มีการป้องกัน TVS
แผ่นกำลัง ESC 2x
เซ็นเซอร์ปัจจุบัน: 220A, 3.3V ADC (มาตราส่วน 150 ใน INAV, 66.7 A/V ใน อาร์ดูไพล็อต)
ตัวต้านทานการรู้สึก: 90A ต่อเนื่อง, 220A สูงสุด
BEC 5V ผลลัพธ์
ออกแบบสำหรับคอนโทรลเลอร์บิน, รับสัญญาณ, OSD, กล้อง, แบตเตอรี่, 2812 แถบ LED, แบตเตอรี่, โมดูล GPS, ความเร็วลม
เอาต์พุต 5.15 +/- 0.1V DC
กระแสต่อเนื่อง 2 แอมป์, 3A ปีก
BEC 9V /12V ผลลัพธ์
ออกแบบสำหรับวิดีโอตัวส่ง, กล้อง, กิมบอล เป็นต้น
กระแสต่อเนื่อง 2 แอมป์ 3A คลื่นยอด
ตัวเลือก 12V ด้วย Jumper pad
เอาต์พุต BEC Vx
ออกแบบสำหรับเซอร์โว
สามารถปรับแรงดันได้ ค่าเริ่มต้นคือ 5V หรือ 6V หรือ 7.2V ผ่านการตั้งค่าแบบจัมเปอร์
กระแสต่อเนื่อง 8 แอมป์ 10A สูงสุด
BEC 3.3V ผลลัพธ์
เรกูลาเตอร์เชิงเส้น
กระแสต่อเนื่อง: 200mA
กายภาพ
การติดตั้ง: 30.5 x 30.5 มม., Φ4 มม. พร้อมกับกรอส Φ3 มม.
ขนาด: 54 x 36 x 13 มม.
น้ำหนัก: 30 กรัมพร้อมกับตัวต่อ USB เคเบิล
แพ็กเกจรวม
1x H743-WING
1x USB(Type-C)/Beep (เครื่องบู๊เซอร์แบบซ้อน)
สาย 1x 20cm JST-SH-6P ถึง JST-SH-6P สำหรับต่อ USB เครื่องขยายสัญญาณ
สาย 2x 20 ซม. JST-GH-4P ไปยังสายจัดการ JST-GH-4P สำหรับพอร์ต CAN และ I2C
1x คอนเดนเซอร์ Rubycon ZLH 35V 470uF
ตัวต่อ ดุพอนท์ขนาด 2.54 พิน (บอร์ดจัดส่งยังไม่ได้สั่งลายพิมพ์เหลือง)
การทำแผนที่ INAV

RC อินพุต
พิน Rx6 ที่ถูกกำหนดเป็นขาเข้าของตั้งเวลาโดยค่าเริ่มต้นสามารถใช้สำหรับโปรโตคอลตัวรับที่รองรับโดย อาร์ดูไพล็อต ทั้งหมดยกเว้น CRSF ซึ่งต้องการการเชื่อมต่อ UART แบบแท้จริง อย่างไรก็ตาม โปรโตคอลทางทวารสารที่มีการส่งข้อมูลระวัง เช่น SRXL2 และ FPหรือt เมื่อเชื่อมต่อในลักษณะนี้จะให้เฉพาะ RC โดยไม่มีการส่งข้อมูลระวัง
เพื่อให้ CRSF และการเก็บข้อมูลโทรมาตรึงไว้จาก Fpหรือt,CRSF,และตัวรับสัญญาณ SRXL2 สามารถใช้ปัจจุบันจากขา Rx6 โดยการกำหนดให้ใช้เป็น true UART RX สำหรับการใช้ระบบที่เป็นแบบสองทิศทาง"},as the result. BRD_ALT_CONFIG ให้เป็นขานำ RX ของพอร์ต SERIAL7 เมื่อได้เป็น "1
ด้วยตัวเลือกนี้, SERIAL7_PROTOCOL ต้องตั้งค่าเป็น "23" และ:
ไม่รองรับ PPM
* SBUS/DSM/SRXLเชื่อมต่อกับพอร์ต Rx6 แต่ SBUS ต้องการ ตัวเลือก SERIAL7 ถูกตั้งค่าเป็น "3".
* FPหรือt ต้องเชื่อมต่อกับ Tx6 และ ตัวเลือก SERIAL7 ถูกตั้งค่าไปที่ "7" หาก Telemetry ไม่ทำงานลองตั้งค่า ตัวเลือก SERIAL7 = 135.
* CRSF ยังต้องการการเชื่อมต่อ Tx6 นอกเหนือจาก Rx6 และให้การส่งข้อมูลระยะไกลโดยอัตโนมัติ ตั้งค่า ตัวเลือก SERIAL7 จาก "0".
* SRXL2 ต้องการการเชื่อมต่อกับ Tx6 และให้ข้อมูลเทเลเมตรีโดยอัตโนมัติ ตั้งค่า ตัวเลือก SERIAL7 ไปที่ "4
สามารถใช้ UART ใด ๆ สำหรับการเชื่อมต่อระบบ RC ใน อาร์ดูไพล็อต ได้และเข้ากันได้กับโปรโตคอลทั้งหมดยกเว้น PPM ดู ระบบควบคุมวิทยุ สำหรับรายละเอียด
อาร์ดูไพล็อต รีเลย์ (PINIO)
กล้อง-1 และ Vsw เปิดใช้งานโดยค่าเริ่มต้น
ตรวจสอบให้แน่ใจว่ามีกล้อง 2 ตัวที่ตั้งค่าภาพวิดีโอให้เหมือนกันทั้งสองตัว PAL หรือ NTSC
# GPIOs
PD10 PINIO1 OUTPUT GPIO(81) //สวิตช์เปลี่ยนสถานะการจ่ายไฟ Vsw pad
- PD11 PINIO2 OUTPUT GPIO(82) //สวิตช์กล้อง
# RCx_OPTION: ตัวเลือก RC อินพุต
- 28 เปิด/ปิดรีเลย์
- 34 เปิด/ปิดรีเลย์ที่ 2
- 35 รีเลย์ 3 เปิด/ปิด
- 36 เรลย์ 4 เปิด/ปิด
เช่น
- RELAY_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //เปิด/ปิดรีเลย์ใช้ CH7 ของตัวส่งสัญญาณเพื่อสลับ Vsw
RELAY_PIN2 82 //สวิตช์กล้อง GPIO
RC8_OPTION 34 //Relay2 เปิด/ปิด, ใช้ CH8 ของตัวส่งเพื่อสลับกล้อง
หรือ
RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //เปิด/ปิดรีเลย์ 3, ใช้ CH9 ของตัวส่งสัญญาณเพื่อสลับ Vsw
- RELAY_PIN4 82 //สวิตช์กล้อง GPIO
RC10_OPTION 36 //เปิด/ปิดรีเลย์ 4 ใช้ CH10 ของตัวส่งสัญญาณเพื่อสลับกล้อง
คุณลักษณะที่กำหนดค่าจะถูกกระตุ้นเมื่อค่า pwm ของสวิตช์ลักษณะ เกินกว่า 1800 จะถูกยกเลิกเมื่อค่าลดลงต่ำกว่า 1200
ตรวจสอบค่า pwm ที่ส่งมาจากตัวส่งเมื่อสวิตช์อยู่ในสถานะสูงและต่ำโดยใช้หน้าจอการแปรผันรัศมีวิทยุในหัวข้อการติดตั้งเริ่มต้น >> ฮาร์ดแวร์ที่ต้องการ >> สู่การติดตั้งระบบพลานนิ่งว่าง. หากมีค่าที่ไม่สูงกว่า 1800 หรือต่ำกว่า 1200 การปรับจุดปลายของเซอร์โวในตัวส่งจะเป็นการปรับแต่งที่ดีที่สุด
เคล็ดลับและบันทึก
อาร์ดูไพล็อต
* ช่วงเซ็นเซอร์กระแสปัจจุบันคือ 220A บน H743-WING-V2/V3, ตรวจสอบให้แน่ใจว่าคุณตั้งค่า BATT_AMP_PERVLT เป็น 66.7
* กับ อาร์ดูไพล็อต 4.1 หรือสูงกว่า ตั้งค่า INS_ENABLE_MASK เป็น 7 หรือค่าเริ่มต้น 127
* โปรดดาวน์โหลด เครื่องบินเวอร์ชัน 4.2.0 หรือใหม่กว่าซอฟต์แวร์ อาร์ดูไพล็อต สำหรับ H743-WING-V3
แนะนำให้ใช้ STM32CubeProgrammer เพื่อลบ MCU และอัปโหลด firmware ตรวจสอบบล็อกนี้ http://www.mateksys.com/?p=6905
INAV
* ช่วงเซ็นเซอร์กระแสปัจจุบันคือ 220A บน H743-WING-V2/V3, ตรวจสอบให้แน่ใจว่าคุณตั้งค่า มาตราส่วนมิเตอร์ปัจจุบันถึง 150
* H743-WING-V3 ไม่รองรับโดย INAV4.1 ที่ดาวน์โหลดจากตัวกำหนดค่า โปรดดาวน์โหลด inav_4.1.0_MATEKH743_42688 จากเว็บไซต์
ตั้งแต่ INAV5.0 เป็นต้นไปพวกเขาจะแชร์เฟิร์มแวร์เดียวกัน
คนอื่น ๆ
หาก ESC ที่คุณใช้ไม่มีคอนเดนเซอร์รบกวนที่บริสุทธิ์พอดี ต้องใช้คอนเดนเซอร์ไฟฟ้าที่มี ESR ต่ำเพื่อลดเสียงรบกวนของ ESC