Точные детали:
Советы
1. INAV, DSHOT не может работать на S3, S5, S7 из-за конфликта DMA, пожалуйста, используйте ONESHOT или MULTISHOT и откалибруйте диапазон ШИМ ESC.
2. Бетафлайт, установите dshot_bitbang = ON при использовании X6 и X8 DSHOT.
3. Бетафлайт, имя цели было переименовано в MatekF405TE_SD
4. ArduPilot, установите LOG_BACKEND_TYPE = 1 (File) для логгирования на SD-карту
Спецификации
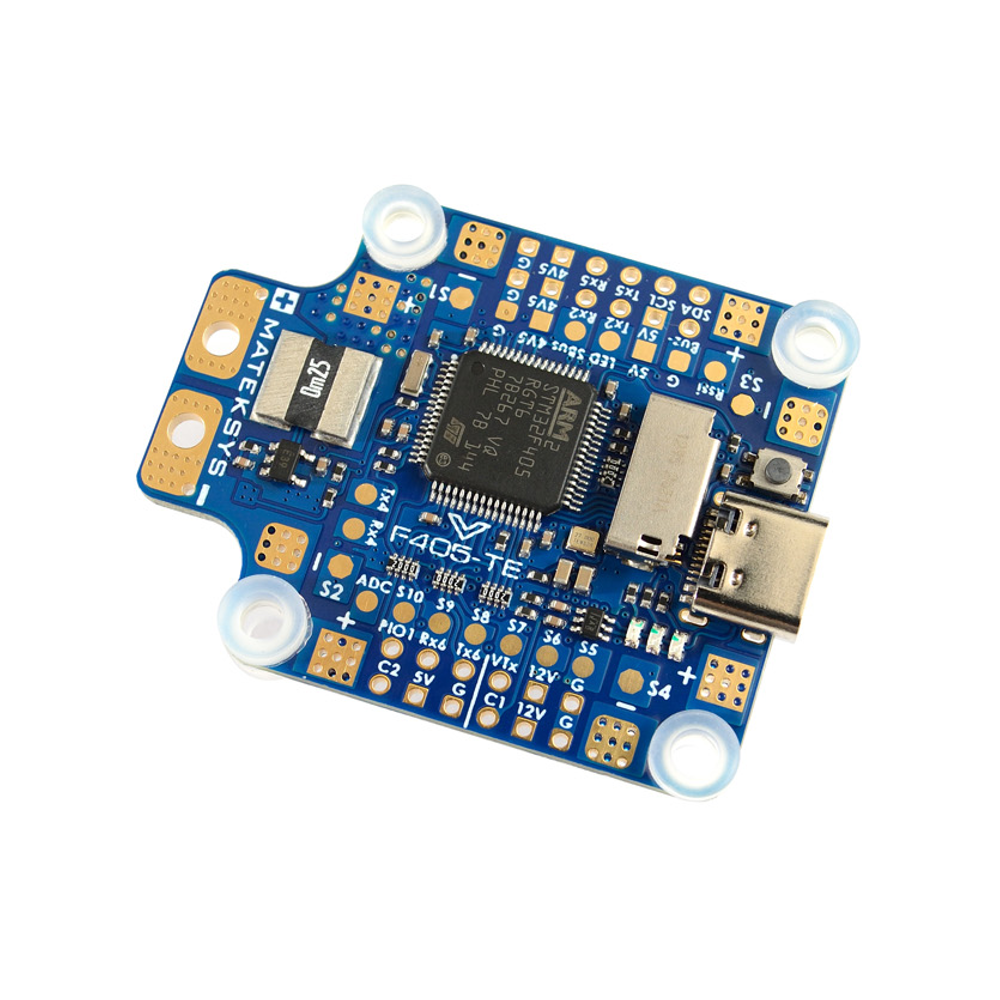
МКУ: STM32F405RGT6, 168 МГц
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
ОСД: AT7456E (SPI)
Blackbox: слот MicroSD (SPI)
6x UART-портов, 1x опция Softserial_Tx (INAV/BF)
11x PWM выходов (8x Dshot совместимо с BF/ArduPilot)
1x I2C
4x ADC (VBAT, Ток, RSSI, Аэроскорость)
1x запасной PINIO
4 раза индивидуальные платы питания/сигнальных проводов ESC
1x группа пластинок G/S1/S2/S3/S4 для сигнала/заземления 4in1 ESC
Встроенный инвертор на UART2-RX для входа SBUS
Переключаемый двойной вход камеры
Спецификации PDB
9 ~ 36В (3 ~ 8S ЛиПо)
PDB: 4x 35А (Макс. 4x 50А)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Текущий сенсор: 220A, 3.3V АЦП (INAV/BF масштаб 150, ArduPilot 66.7 A/V)
Делитель напряжения батареи 1К:20K (масштаб INAV 2100, масштаб BF 210, множитель напряжения ArduPilot BATT_VOLT_MULT 21.0)
Прошивка
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
Бетафлайт: MATEKF405TE_SD
Физический
Монтаж: 30.5 x 30.5 мм, Φ4 мм с люверсами Φ3 мм
Размеры: 36 х 46 мм
Вес: 10 г
Включая
1x F405-TE
6x кремниевых прокладок M4 на M3
1x Рубикон ZLH 35В/470мкФ (низкий ESR)
Откладка и строительство проводки

INAV/BF Картографирование
ArduPilot Картирование
Телеметрия Frsky Smartport
неперевёрнутый (взломанный) сигнал S.Port
любой запасной Uart_TX
Серийный порт_Скорость 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 или 10 (для yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (режим опроса)
Релей (PINIO)
PINIO1, плата PIO1, низкий уровень по умолчанию
PINIO2, Переключатель камеры, C1 ПО УМОЛЧАНИЮ ВКЛ.
#
PA4 PINIO1 ВЫХОД GPIO(81) НИЗКИЙ //Пин PIO1
PB5 PINIO2 ВЫХОД GPIO(82) НИЗКИЙ //переключение камеры
# RCx_OPTION: опция входа RC
28 Реле Вкл/Выкл
34 Реле 2 Вкл./Выкл.
35 Реле3 Вкл/Выкл
36/4 Реле Вкл/Выкл
например
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Включение/выключение реле, используйте CH7 передатчика для управления уровнем PIO1 в низком или высоком состоянии
RELAY_PIN2 82 //GPIO переключатель камеры
RC8_OPTION 34 //Включение/выключение реле2, используйте CH8 передатчика для управления высоким/низким уровнем на панели PB5
Настроенная функция будет активироваться, когда значение ШИМ вспомогательного выключателя станет больше 1800. Она будет деактивирована, когда значение упадет ниже 1200.
Проверьте значение ШИМ, отправленное от передатчика, когда выключатель находится в положении высоко и низко, используя экран калибровки радио в Mission Planner в разделе Начальная настройка >> Обязательное оборудование >> Калибровка радио. Если значение не поднимается выше 1800 или опускается ниже 1200, лучше всего отрегулировать конечные точки сервопривода на передатчике.
Советы
- F405-TE имеет предустановленную прошивку INAV для контроля качества
- установите частоту ШИМ для ESC BLHeli32 на 48 кГц или выше в BLHeliSuite
ArduPilot
Ошибка ArduPilot fw, 0x4000 внутренние ошибки l:213 spi_fail предупреждение, пожалуйста, установите LOG_BACKEND_TYPE = 1 (Файл) для записи на SD-карту. Загрузите прошивку ArduPilot с Здесь.
INAV
С использованием прошивки INAV DSHOT не может работать на S3, S5, S7 из-за конфликта DMA. Пожалуйста, используйте ONESHOT или MULTISHOT и откалибруйте диапазон ШИМ ESC.
Скачайте прошивку INAV 4.1.x с веб-сайта Matck. INAV5.x или новее можно скачать напрямую из INAV конфигуратора.
Бетафлайт
Если используется 5V пассивный зуммер, выполните команду CLI «set beeper_frequency = 2500»
Цель MATEKF405TE_SD поддерживалась с версии BF4.4.
Назначить dshot_bitbang = ВКЛ при использовании X6 и X8 DSHOT,
Вы можете скачать BF 4.3 непосредственно из конфигуратора BF, BF 4.2.x - с Здесь.
Барометр SPL06-001 не поддерживается Betaflight.