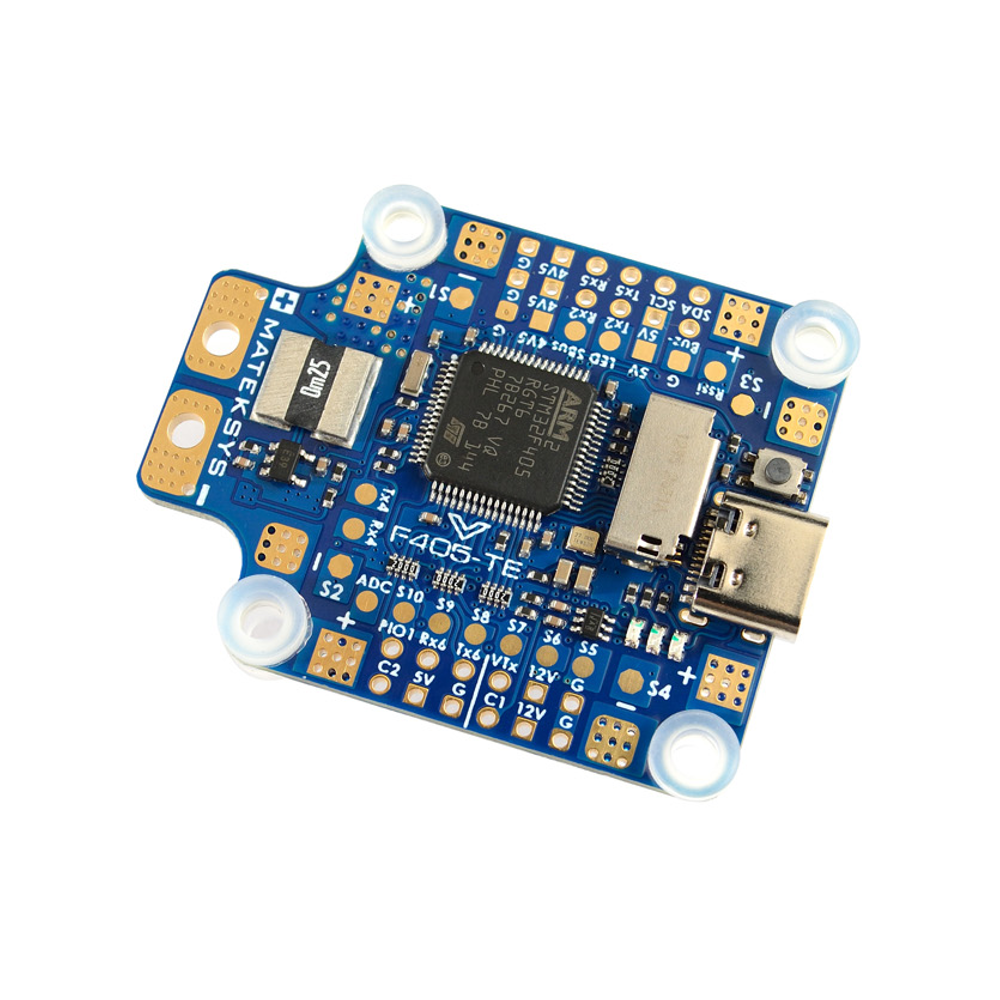
Precyzyjne szczegóły:
Wskazówki
1. INAV, DSHOT nie mogą działać na S3, S5, S7 z powodu konfliktu DMA, proszę używać ONESHOT lub MULTISHOT i skalibrować zakres PWM ESC.
2. BetaFlight, ustaw dshot_bitbang = ON podczas korzystania z X6 i X8 DSHOT.
3. BetaFlight, Nazwa docelowa została zmieniona na MatekF405TE_SD
4. ArduPilot, ustaw LOG_BACKEND_TYPE = 1 (Plik) dla zapisu na karcie SD
Specyfikacje
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: Slot na kartę MicroSD (SPI)
6x UARTów, opcja 1x Softserial_Tx (INAV/BF)
11 wyjść PWM (8 kompatybilne z Dshot dla BF/ArduPilot)
1x I2C
4x ADC (VBAT, Prąd, RSSI, Prędkość powietrza)
1x zapasowy PINIO
4x indywidualne pad'y zasilania/sygnału ESC
1x Grupa padów G/S1/S2/S3/S4 dla sygnału/GND 4in1 ESC
Wbudowany przetwornik na UART2-RX dla wejścia SBUS
Przełączalne podwójne wejście kamery
Specyfikacja bazy danych PDB
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Maks.4x 50A)
BEC: 5V 1,5A
BEC: 12V 2A
LDO 3,3 V: 200 mA
Bieżący czujnik: 220A, 3.3V ADC (skala INAV/BF 150, ArduPilot 66.7 A/V)
Podział napięcia baterii 1K:20K (skala INAV 2100, skala BF 210, mnożnik napięcia baterii ArduPilot 21.0)
Oprogramowanie
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Fizyczny
Montaż: 30,5 x 30,5 mm,Φ4 mm z uszczelkami Φ3 mm
Wymiary: 36 x 46 mm
Waga: 10g
Włączając
1x F405-TE
6x osłonek silikonowych M4 na M3
1x Rubycon ZLH 35V/470uF (niski ESR)
Układ & Podłączanie

Mapowanie INAV/BF
ArduPilot Mapowanie
Frsky Smartport Telemetria
sygnał nieodwrócony (zhakowany) S.Port
jakiekolwiek wolne Uart_TX
SERIALx_BAUD 57
SERIALx_OPCJE 7
SERIALx_PROTOCOL 4 lub 10 (dla yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (tryb sondowania)
Przekaźnik(PINIO)
PINIO1, PIO1 pad, Poziom niski domyślnie
PINIO2, przełącznik kamery, domyślnie włączony C1
GPIOs
PA4 PINIO1 OUTPUT GPIO(81) LOW //PIO1 pad
PB5 PINIO2 WYJŚCIE GPIO(82) NISKI //przełącznik kamery
# RCx_OPTION: opcja wejścia RC
28 Przełącznik Włącz/Wyłącz
34 Przekaznik 2 Wlaczenie/Wylaczenie
35 Przekaźnik3 Włącz/Wyłącz
36 Przekaznik4 Wł/Wył
e.g.
RELAY_PIN 81 //PIO1 GPIO
RC7_OPCJA 28 //Włącz/Wyłącz przekaźnik, Użyj CH7 nadajnika do sterowania poziomem niskim/wysokim PIO1
RELAY_PIN2 82 //GPIO przełącznika kamery
RC8_OPCJA 34 //Włącz/Wyłącz przekaźnik2, Użyj CH8 nadajnika do kontroli poziomu niskiego/wysokiego na padzie PB5
Funkcja konfigurowana zostanie uruchomiona, gdy wartość PWM przełącznika pomocniczego stanie się wyższa niż 1800. Zostanie dezaktywowana, gdy wartość spadnie poniżej 1200.
Sprawdź wartość PWM wysłaną z nadajnika, gdy przełącznik jest w pozycji wysokiej i niskiej, korzystając z ekranu Kalibracja radiowa w planerze misji Initial Setup >> Mandatory Hardware >> Radio Calibration. Jeśli nie wzrośnie powyżej 1800 ani nie spadnie poniżej 1200, najlepiej dostosować końcowe punkty serwomechanizmu w nadajniku.
Wskazówki
- F405-TE ma wcześniej załadowany firmware INAV do kontroli jakości
- ustaw częstotliwość PWM ESC BLHeli32 na 48 kHz lub wyższą w programie BLHeliSuite
ArduPilot
ArduPilot fw, ostrzeżenie „Błędy wewnętrzne 0x4000 l:213 spi_fail”, proszę ustawić LOG_BACKEND_TYPE = 1 (Plik) dla zapisu na karcie SD. Pobierz firmware ArduPilot z TUTAJ.
INAV
Z oprogramowaniem INAV nie działa DSHOT na S3, S5 i S7 z powodu konfliktu DMA, proszę używać ONESHOT lub MULTISHOT i skalibrować zakres PWM ESC.
Pobierz oprogramowanie INAV w wersji 4.1.x ze strony internetowej Matck. INAV 5.x lub nowsze bezpośrednio z konfiguratora INAV.
BetaFlight
Jeśli używasz pasywnego brzęczyka 5V, wpisz w konsoli "set beeper_frequency = 2500
Celem MATEKF405TE_SD było wsparcie od wersji BF4.4.
ustaw dshot_bitbang = ON podczas korzystania z DSHOT w przypadku X6 i X8,
Możesz pobrać BF 4.3 bezpośrednio z konfiguratora BF, BF 4.2.x z Tutaj.
Barometr SPL06-001 nie jest obsługiwany przez Betaflight.