פרטים מדויקים:
מפרטים:
שם המותג: מאטק
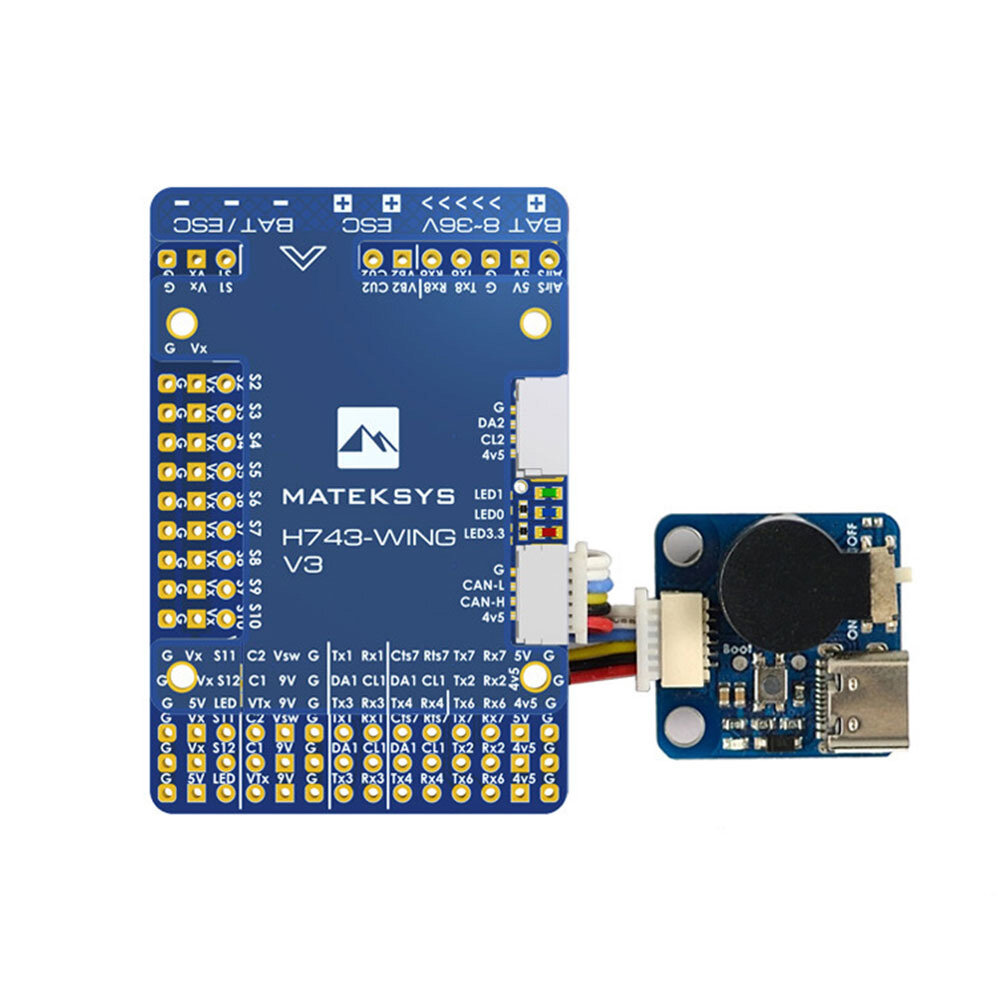
שם הפריט: H743-WING V3
מדריך התחלה מהירה, לחץ כאן
מפרטי ה-FC:
MCU: STM32H743VIT6, 480MHz , RAM של 1 מגהבייט, Flash של 2 מגהבייט
IMU: MPU6000 (SPI1) ו-ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: חריץ לכרטיס MicroSD (SDIO)
7 פורטי UART (1,2,3,4,6,7,8) עם הפיכה מובנית.
13 יציאות PWM (כולל מגע LED)
2x I2C
1x CAN
6x ADC (VBAT,זרם,RSSI,מהירות אזור אוויר אנלוגית,VB2,CU2)
3x נוריות LED למצב FC (כחול,אדום) ולמחוון 3.3V (אדום)
1x SPI3 breakout
הרחבת USB / Beep עם סוג-סי (USB2.0)
מתג כניסות מצלמת כפולה
מתג חשמל למצלמה/VTX 5V/9V(12V)
חיישן זרם בדיוק גבוה (90A לוהט, 220A זמן שיא)
חיישן מתח סוללה: 1K:10K (סקאלה 1100 ב- INAV, BATT_VOLT_MULT 11.0 ב- ArduPilot)
מחולל זמן סוללה VB2 ADC: 1K:20K
מחולל זמן מהירות אוויר: 20K:20K
הספק סטטי 160mA@5V
קושחה FC
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
תוכנה מרכזית לחץ כאן
PDB
טווח מתח קלט: 8~36V (3~8S LiPo) עם הגנת TVS
2x כריתי כוח ESC
חיישן נוכחי: 220A, דיסק אנלוגי 3.3V (סולם 150 בINAV, 66.7 A/V ב- ArduPilot)
ממסער מוליך: 90A רציף, 220A שיא.
יציאת 5V BEC
מעוצב עבור בקר טיסה, מקלט, OSD, מצלמה, ציוד אזעקה, רצועת LED 2812, מודול GPS, מהירות אוויר
פלט 5.15 +/- 0.1V DC
זרם רציף 2 אמפרים, שיאי 3A
BEC 9V / 12V פלט
מעוצב עבור משדר וידאו, מצלמה, גימבל וכו'.
זרם רצוף 2 אמפרים, עליון 3A
אפשרות 12V עם מרכז קפיצי
פלט BEC Vx
מעוצב עבור סרבוסים
מתח הניתן להתאמה, ברירת מחדל 5V, 6V או 7.2V באמצעות מבחר
זרם מתמיד 8 אמפרים, 10A פיק
פלט BEC במתח של 3.3V
רגולטור ליניארי
זרם רצוף: 200mA
פיזי
הרכבה: 30.5 × 30.5 מ"מ,Φ4 מ"מ עם חורמות Φ3 מ"מ
ממדים: 54 × 36 × 13 מ"מ
משקל: 30 גרם עם מתאם USB
החבילה כוללת
1x H743-כנף
1x USB(Type-C)/מרחיק זוהר (באזר שקט)
1x כבל JST-SH-6P to JST-SH-6P באורך 20 ס"מ עבור מרחיק USB.
שני כבלים באורך 20 ס"מ,מסוג JST-GH-4P ל-JST-GH-4P,ליציאות CAN ו־I2C
1x ממודד Rubycon ZLH 35V 470uF
פינים של Dupont בגודל 2.54 (הלוח נשלח לא ממוסך)
מיפוי INAV

קלט RC
הפין Rx6, שלמחילה מוקצה לקלט של טיימר, יכול לשמש לכל פרוטוקולי הקלט התומכים ב-ArduPilot, למעט CRSF שדורש חיבור UART אמיתי. עם זאת, פרוטוקולים דו כיווניים הכוללים טלמטריה, כמו SRXL2 ו-FPאוt, כאשר הם מחוברים בדרך זו, יספקו רק בקרה מרחוק (RC) מבלי לספק תצוגת נתוני טלמטריה.
כדי לאפשר את הזמינות של CRSF וטלמטריה מוטמעת ב-Fpאוt, CRSF ו-SRXL2, ניתן גם להגדיר את פין Rx6 כפין UART RX אמיתי לשימוש עם מערכות דו-כיווניות באמצעות הגדרה BRD_ALT_CONFIG ל-"1" כך שיהיה פין הקלט RX של יציאת הסילבר 7.
עם אפשרות זו, SERIAL7_PROTOCOL חייב להיות מוגדר ל-"23", וגם:
* PPM אינו נתמך.
SBUS/DSM/SRXL מתחבר לפין Rx6, אך SBUS דורשת ש- אפשרויות_SERIAL7 הוגדר ל"3".
* ה - FPאוt דורש חיבור ל - Tx6 ו אפשרויות_SERIAL7 הגדר ב "7". אם הטלמטריה אינה עובדת, נסה להגדיר אפשרויות_SERIAL7 = 135.
CRSF דורש גם חיבור Tx6, בנוסף לחיבור Rx6, ומספק אוטומטית טלמטריה. הגדר אפשרויות_SERIAL7 ל-"0".
* SRXL2 דורש חיבור ל Tx6 ומספק אוטומטית טלמטריה. הגדר אפשרויות_SERIAL7 ל "4".
ניתן להשתמש בכל יציאת UART לחיבור מערכות RC ב-ArduPilot והוא תואם עם כל הפרוטוקולים למעט PPM. ראה מערכות שליטה רדיו לפרטים.
ArduPilot רלה(PINIO)
מצלמה-1 ו-Vsw פעילים כברירת מחדל
ודא ש-2 מצלמות מוגדרות עם פורמט וידאו זהה, הן PAL או הן NTSC.
GPIOs
PD10 PINIO1 פלט GPIO(81) //מתג כוח Vsw pad
- PD11 PINIO2 יצוא GPIO(82) //מתג מצלמה
# RCx_OPTION: אפשרות קלט RC
- 28 צירוף/כיבוי רלה
- 34 רלה2 הפעלה/כיבוי
- 35 הפעל/כבה לוויל 3
- 36 רלה4 הפעלה/כיבוי
על דוגמה
- RELAY_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //הדלק/כבה רלה, השתמש ב-CH7 של השדרן כדי להחליף את Vsw
- RELAY_PIN2 82 //גיאקו של מצלמה
- RC8_OPTION 34 //הדלקת/כיבוי רלה 2, השתמש ב-CH8 של השדרן כדי להחליף בין המצלמות
או
פין רלהי 3 81 //Vsw GPIO
- RC9_OPTION 35 //הדלקת/כיבוי רלה 3, השתמש בערוץ 9 של השולט כדי למזער את Vsw
- RELAY_PIN4 82 //מתג המצלמה GPIO
RC10_OPTION 36 //הדלקה/כיבוי ממיר, השתמש ב-CH10 של השולט כדי להחליף בין המצלמות
התכונה שהוגדרה תופעל כאשר ערך פולס רוחב הדלקת המתנד המלווה יהיה גבוה מ-1800. התכונה תתבטל כאשר הערך יירד מתחת ל-1200.
בדוק את ערך PWM שנשלח מהמשדר כאשר המתג גבוה ונמוך באמצעות מסך כיוונון הרדיו במהנדס המשימה >> הגדרה ראשית >> כוונון רדיו. אם הערך אינו עולה מעל 1800 או יורד מתחת ל-1200, כדאי להתאים את קצוות הסרבו במשדר.
טיפים והערות
ArduPilot
*טווח חיישן הנוכחי הוא 220A ב- H743-WING-V2/V3, ודא שאתה מגדיר את BATT_AMP_PERVLT ל- 66.7
* עם ArduPilot 4.1 או גרסה גבוהה יותר, הגדר את INS_ENABLE_MASK ל-7 או לברירת מחדל 127.
* אנא הורד טיסה 4.2.0 או חדש יותרתוכנת הפרימוורק ArduPilot עבור H743-WING-V3
מומלץ להשתמש ב-STM32CubeProgrammer כדי למחוק את ה-MCU ולהעלות תוכנה. בדוק מה בבלוג זה http://www.mateksys.com/?p=6905
INAV
*טווח חיישן הנוכחי הוא 220A ב- H743-WING-V2/V3, ודא שאתה מגדיר את קנה מדידה לזרם נוכחי עד 150
* H743-WING-V3 אינו נתמך על ידי INAV4.1 שהורד מתוך התצורה. אנא הורד inav_4.1.0_MATEKH743_42688 מהאתר.
החל מ-INAV5.0, הם יחלקו את אותה תכנה קושחה.
אחרים
* אם הממירים ESC שאתה משתמש בהם אינם מכילים מספיק מתנגדים מובנים, נדרש מתנגד קלטרוליטי נמוך ESR להפחתת רעש ESC.