פרטים מדויקים:
טיפים
1. INAV, DSHOT לא יכול לעבוד על S3, S5, S7 בגלל התנגשות DMA, בבקשה להשתמש ב ONESHOT או MULTISHOT ולכוון טווח PWM של ESC.
2. בטהפלייט, הגדר dshot_bitbang = ON כאשר משתמשים ב-X6 ו-X8 DSHOT.
3. בֵּיטָהפלַיְט, שם היעד שונה ל-MatekF405TE_SD
4. ArduPilot, הגדר LOG_BACKEND_TYPE = 1 (קובץ) עבור התיעוד בכרטיס SD
מפרטים
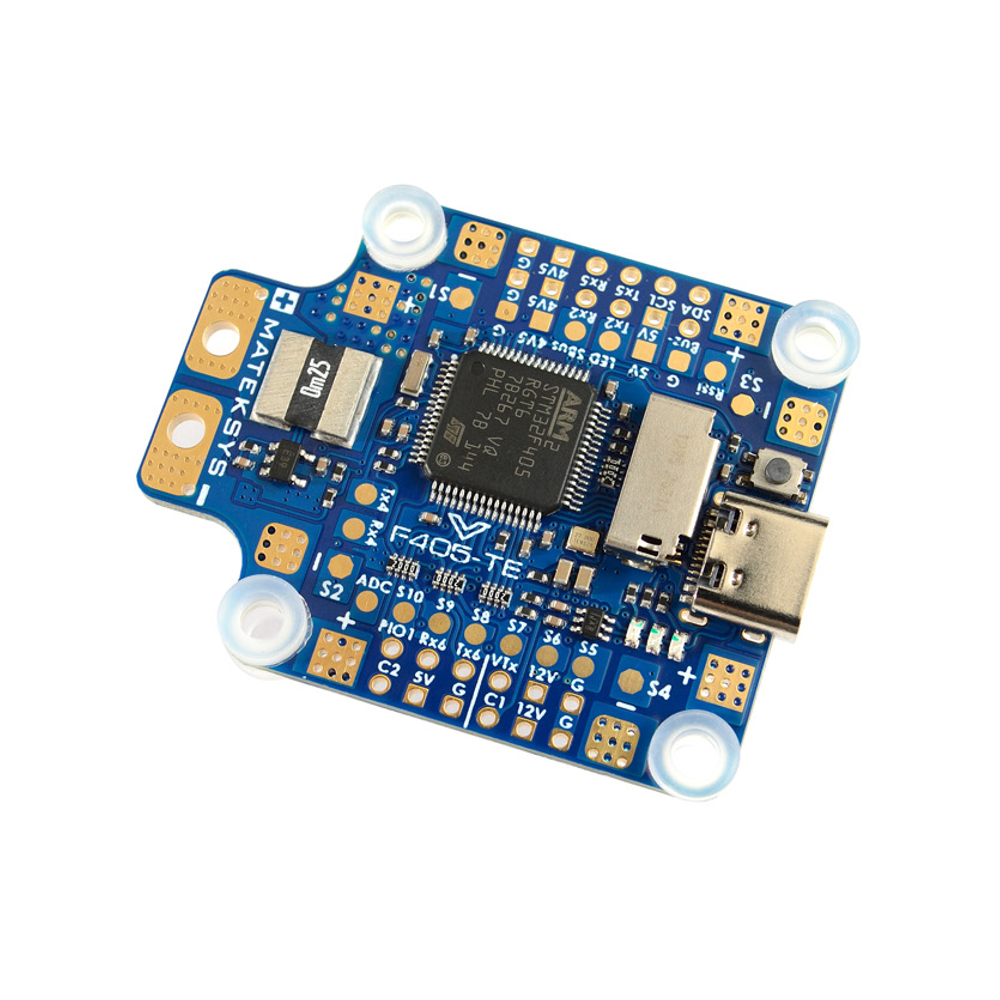
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: חריץ MicroSD (SPI)
6 פורטי UART, אפשרות 1x Softserial_Tx (INAV/BF)
11 יציאות PWM (8 תואמות Dshot עם BF / ArduPilot)
1x I2C
4 × ADC (VBAT, זרם, RSSI, מהירות האוויר)
1x פיניו חילופי
4x באטריות ייחודיות לספק כוח/אות ESC
1x קבוצת פדים G/S1/S2/S3/S4 עבור סיגנל/GND 4in1 ESC
מובנה במהדורה חוצה על UART2-RX עבור קלט SBUS
קלט מצלמת כפולה הניתן לשנות
מפרטי PDB
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35א (מקס.4x 50א)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
חיישן נוכחי: 220A, 3.3V ADC (סולם INAV/BF 150, ArduPilot 66.7 A/V)
מחיצת מתח בטריה 1K:20K (קנה מידה INAV 2100, קנה מידה BF 210, כפל מתח סוללת ArduPilot 21.0)
קושחה
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
בֵּיטָהפלַיְט: MATEKF405TE_SD
פיזי
הרכבה: 30.5 × 30.5 מ"מ,Φ4 מ"מ עם חורמות Φ3 מ"מ
ממדים: 36 x 46 מ"מ
משקל: 10 גרם
כולל
1x F405-TE
6x מוסדות סיליקון M4 אל M3
1x רוביקון ZLH 35V/470uF (ESR נמוך)
פריסה וחיבורים

מיפוי INAV/BF
תמונת מפתח ArduPilot
טלמטריה של פרסקי סמארטפורט
אות מהשורה S.Port שאינו הפוך (נחקר)
כל UART_TX חילופי
SERIALx_BAUD 57
אפשרויות_SERIALx 7
SERIALx_PROTOCOL 4 או 10 (עבור yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (מצב סקר)
רֶלֵאי (PINIO)
PINIO1, כריתת PIO1, רמה נמוכה כבררת מחדל
PINIO2, מתג מצלמה, C1 מופעל כברירת מחדל
GPIOs
PA4 PINIO1 OUTPUT GPIO(81) LOW //PIO1 pad
PB5 PINIO2 OUTPUT GPIO(82) LOW //מתג מצלמה
# RCx_OPTION: אפשרות קלט RC
28 רלה דל/כבוי
34 רלה 2 הפעלה/כיבוי
35 רֶלֶה3 דלוק/כבוי
36 רלה 4 מופעלת/כבויה
על דוגמה
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //הדלק/כבה רלה, השתמש/י ב־CH7 של השדרן כדי לשלוט על רמת PIO1 נמוכה/גבוהה
RELAY_PIN2 82 //החלפת GPIO המצלמה
RC8_OPTION 34 //הדלק/כבה רלה2, השתמש בCH8 של השדרן לשליטה על רמת נמוכה/גבוהה בגבישת PB5
התכונה המוגדרת תפועל כאשר ערך ה־PWM של מתג העזר הופך להיות גבוה מ-1800. היא תישבת כשהערך יורד מתחת ל־1200.
בדוק את ערך ה־PWM שנשלח מהשולחן התדר בעת שהמתג נמוך וגבוה בעזרת מתכנן המשימות Initial Setup >> Mandatory Hardware >> Radio Calibration. אם ערך ה־PWM לא עולה למעלה מ-1800 או יורד ממתחת ל-1200, כדאי להתאים את נקודות הסיום של הסרוו בשולחן התדר.
טיפים
- F405-TE מגיע טעון עם קושחה של INAV עבור בדיקת איכות
- הגדר את תדר ה- PWM של ESC של BLHeli32 ל־48 קילוהרץ או יותר ב־BLHeliSuite
ArduPilot
ArduPilot fw, אזהרה "שגיאות פנימיות 0x4000 l:213 spi_fail", אנא הגדר LOG_BACKEND_TYPE = 1 (קובץ) עבור התנתקות כרטיס SD.
הורד את תוכנת הקושחה של ArduPilot מ כאן.
INAV
עם התוכנה INAV, DSHOT לא יכול לעבוד על S3, S5, S7 בגלל קריסה של DMA, בבקשה השתמש ב ONESHOT או MULTISHOT וכוונן את טווח ה-ESC PWM.
הורד קושחה INAV 4.1.x מאתר Matck. INAV5.x או גירסה חדשה יותר ישירות מהמגדיר של INAV.
בֵּיטָהפלַיְט
אם אתה משתמש בזוזזת פסיבית במתח 5V, הקלד את הפקודה "set beeper_frequency = 2500" ב-CLI
המטרה MATEKF405TE_SD נתמכה מאז BF4.4.
הגדר את dshot_bitbang = ON כאשר משתמשים בטכנולוגיית DSHOT במקרה של X6 ו-X8,
ניתן להוריד את BF 4.3 ישירות מConfigurator של BF, BF 4.2.x מ כאן.
ברומטר SPL06-001 לא נתמך על ידי Betaflight.