Detail yang tepat:
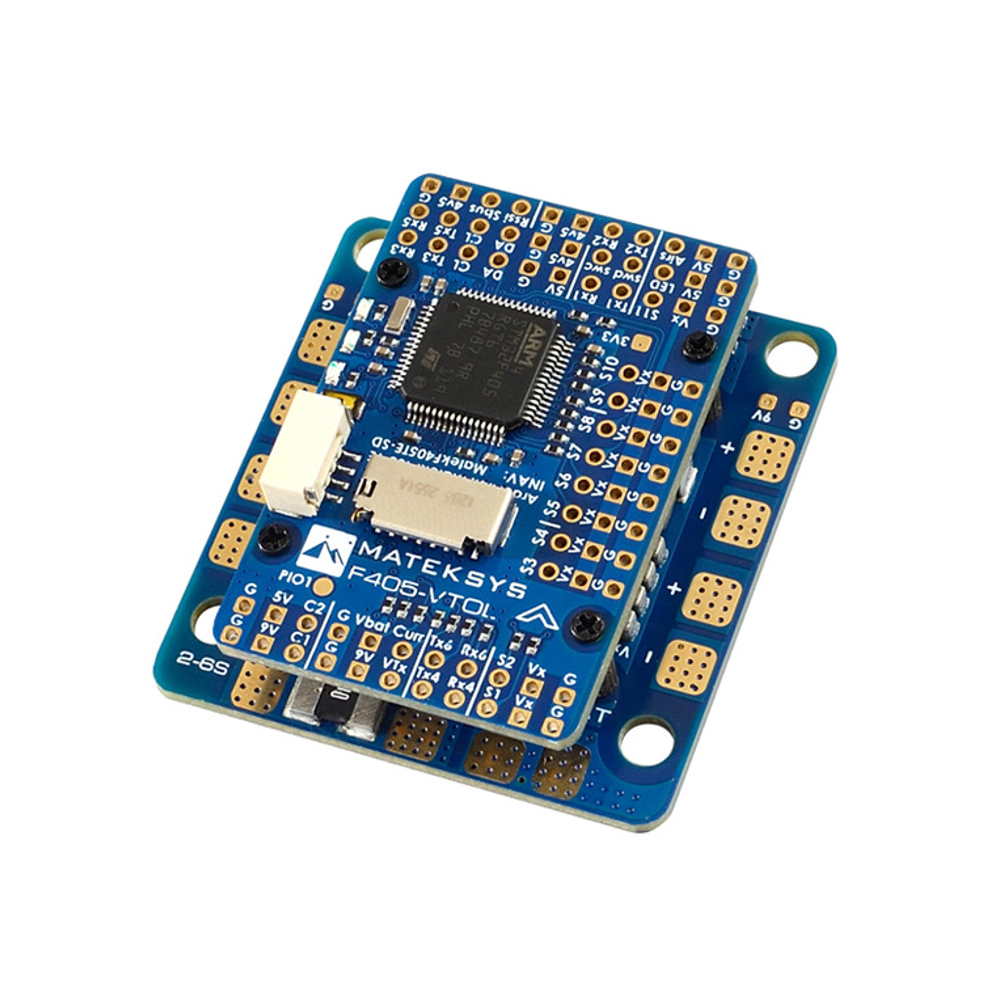
Spesifikasi FC
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Kotak hitam: Slot kartu MicroSD
6x UART, 1x Pilihan Softserial_Tx(INAV)
12x PWM output
1x I2C
4x ADC (VBAT, Arus, RSSI, Kecepatan Udara)
1x PINIO cadangan
Perpanjangan USB/Beep dengan tipe-C (USB2.0)
Built in inverter pada UART2-RX untuk masukan SBUS
Masukan Kamera Ganda yang Dapat Diberalihkan
Perangkat Lunak Firmware FC
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 atau yang lebih baru)
Firmware untuk Pengendali Penerbangan Klik di sini
PDB
Rentang tegangan masukan: 6.8~30V (2~6S LiPo)
Sense resistor: 100A terus-menerus, 220A puncak
5x ESC pad listrik, total 100A terus-menerus
Dukungan beban kontinu hingga 100A pada pad ESC dekat resistor sensor arus
Dukung beban kontinu hingga 30A & puncak 50A pada setiap pad ESC Quadcopter
Pemisah Tegangan Baterai 1K:20K (Skala 2100 di INAV, BATT_VOLT_MULT 21.0 di ArduPilot)
Sensor saat ini: 220A, 3,3V ADC (Skala 150 di INAV, 66,7 A/V di ArduPilot)
Keluaran BEC 5V
Dirancang untuk pengendali penerbangan, penerima, OSD, kamera, buzzer, 2812 strip LED, buzzer, modul GPS, AirSpeed
Arus terus-menerus: 2 Ampere
Output BEC 9V /12V
Dirancang untuk pemancar video, kamera, gimbal, dll.
Arus terus-menerus: 2 Ampere
Pilihan 12V dengan jumper pad
untuk keluaran 9V/12V yang stabil, tegangan masukan harus > tegangan keluaran +1V
Keluaran BEC Vx
Dirancang untuk servo
Tegangan dapat diatur, 5V Default, 6V atau 7.2V melalui jumper
Arus terus menerus: 8 Ampere, 10A Puncak
untuk output Vx yang stabil, tegangan masukan harus > tegangan Vx +1V
Keluaran BEC 3.3V
Dirancang untuk modul Baro/Kompas dan periferal eksternal 3,3V
Regulator linear
Arus terus menerus: 200mA
Fisik
Pemasangan: 25 x 25 mm-Φ2 mm, 35 x 35 mm-Φ4 mm
Dimensi: 45 x 42 x 15mm
Berat: 25g dengan adaptor USB/buzzer
Termasuk
1x F405-VTOL
1x USB(Type-C)/Beep (Buzzer pasif) Perpanjangan + 20cm kabel JST-SH-6P ke JST-SH-6P untuk perpanjangan USB.
Kabel 1x 20cm JST-GH-4P ke JST-GH-4P untuk port I2C
1x Rubycon ZLH 35V 470uF kapasitor
Penukaran Dupont 2.54 (Papan dikirim tanpa dilas)
Layout

Kabel VTOL (ArduPlane)
Kabel Pesawat Normal (INAV)
Pemetaan INAV
PINIO
PINIO1 /PIO1 pad, Level rendah secara default, Beralih antara level Rendah/Tinggi melalui Mode-USER1
PINIO2 digunakan untuk beralih masukan kamera melalui Modes-USER2
Tips
F405-VTOL memiliki INAV fw yang sudah dimuatkan sebelumnya untuk QC
Unduh INAV (Target MATEKF405TE_SD) fw 5.x atau yang lebih baru langsung dari konfigurator INAV 5.x atau yang lebih baru.
Pemetaan ArduPilot
Telemetri Frsky Smartport
sinyal non-inversi (terhack) S.Port
Uart_TX tumpangan apa pun
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 atau 10 (untuk yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYP = 3
SERIALx_PROTOCOL = 33
MSP_OPSI = 0 (mode pemungutan suara)
Relai(PINIO)
PINIO1, PINO1 pad, Tingkat Rendah secara default
PINIO2, Pindah kamera, C1 ON secara default
# GPIOs
PA4 PINIO1 OUTPUT GPIO(81) RENDAH //pad PIO1
PB5 PINIO2 OUTPUT GPIO(82) RENDAH //penukaran kamera
# RCx_OPTION: Opsi masukan RC
28 Rele On/Off
34 Relay2 Hidup/Mati
35 Relai3 On/Off
36 Relai4 Hidup/Matikan
misalnya
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relai Nyala/Mati, Gunakan CH7 dari Transmitter untuk mengontrol Tingkat Rendah/Tinggi PIO1
RELAY_PIN2 82 //Kamera switch GPIO
RC8_OPTION 34 //Relay2 On/Off, Gunakan CH8 pada Transmitter untuk mengontrol level tinggi/rendah pada koneksi PB5
Fitur yang dikonfigurasi akan dipicu ketika nilai pwm switch sekunder menjadi lebih tinggi dari 1800. Ini akan dinonaktifkan ketika nilai turun di bawah 1200.
Periksa nilai pwm yang dikirim dari pengirim saat tombol dalam posisi tinggi dan rendah menggunakan layar Initial Setup >> Mandatory Hardware >> Radio Calibration dari Mission Planner. Jika nilainya tidak naik di atas 1800 atau turun di bawah 1200, sebaiknya sesuaikan titik akhir servo pada pengirim.
TIPS
F405-VTOL memiliki INAV fw yang sudah dimuatkan sebelumnya untuk QC
Target MATEKF405TE_SD tidak terdaftar dalam konfigurator INAV 4.x.x. Itu didukung oleh INAV 5.0 atau yang lebih baru.
ArduPilot fw, 'Kesalahan internal 0x4000 l:213 spi_fail' peringatan, mohon atur LOG_BACKEND_TYPE = 1 (File) untuk pencatatan kartu SD.