Detail yang tepat:
TIPS
1. INAV, DSHOT tidak bisa berfungsi di S3, S5, S7 karena bentrok DMA, harap gunakan ONESHOT atau MULTISHOT dan kalibrasikan jangkauan PWM ESC.
2. BetaFlight, atur dshot_bitbang = HIDUP saat menggunakan X6 dan X8 DSHOT.
3. BetaFlight, Nama target diubah menjadi MatekF405TE_SD
4. ArduPilot, atur LOG_BACKEND_TYPE = 1 (File) untuk logging SD card
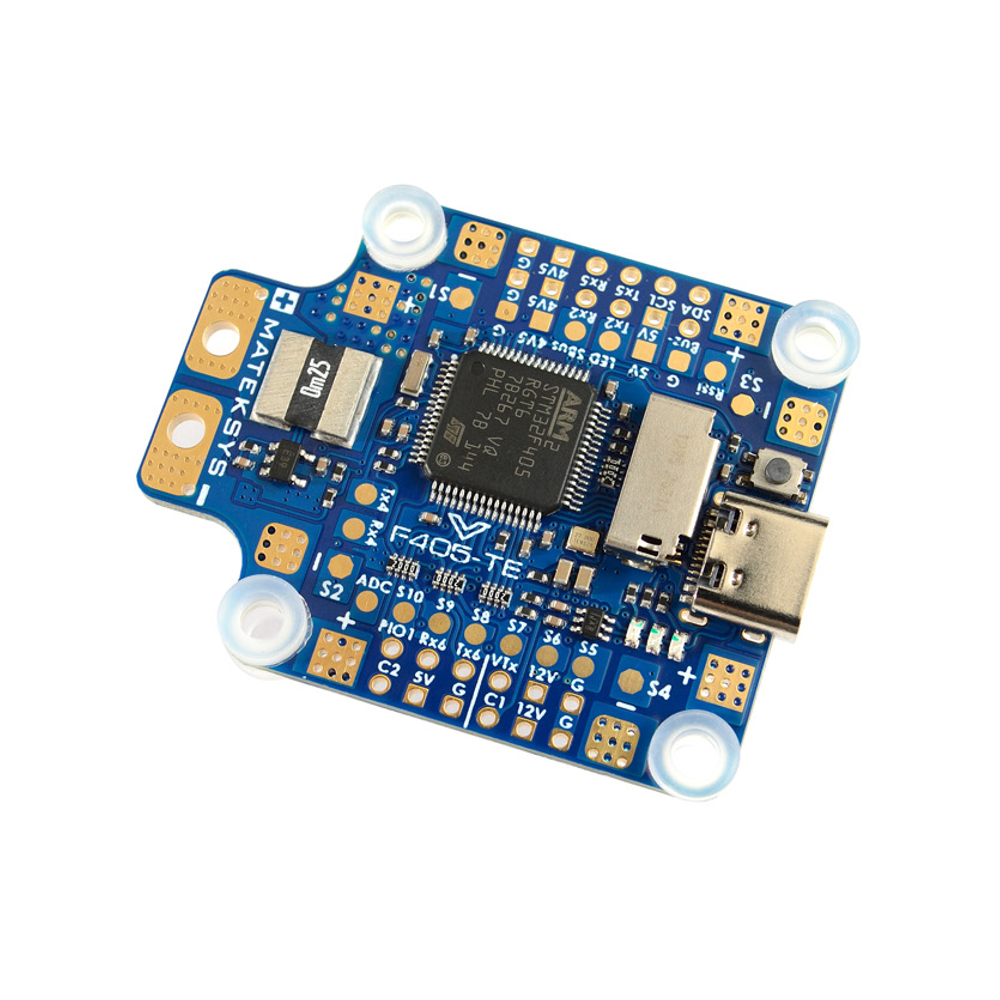
Spesifikasi
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: Slot MicroSD (SPI)
6x UART, 1x opsi Softserial_Tx (INAV/BF)
11x output PWM (8x kompatibel dengan Dshot BF/ArduPilot)
1x I2C
4x ADC (VBAT, Arus, RSSI, Kecepatan Udara)
1x PINIO cadangan
4x lapisan daya/sinyal ESC individu
1x kelompok dari pad G/S1/S2/S3/S4 untuk sinyal/GND 4in1 ESC
Built in inverter pada UART2-RX untuk masukan SBUS
Masukan Kamera Ganda yang Dapat Diberalihkan
Spesifikasi PDB
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Max.4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Saat ini Sensor: 220A, 3,3V ADC (Skala INAV/BF 150, ArduPilot 66,7 A/V)
Pembagi Tegangan Baterai 1K:20K (skala INAV 2100, skala BF 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Fisik
Pemasangan: 30,5 x 30,5mm, Φ4mm dengan cincin karet Φ3mm
Dimensi: 36 x 46 mm
Berat: 10g
Termasuk
1x F405-TE
6x grommet silikon M4 ke M3
1x Rubycon ZLH 35V/470uF (ESR Rendah)
Tata Letak & Kabel

Pemetaan INAV/BF
Pemetaan ArduPilot
Telemetri Frsky Smartport
sinyal non-inversi (terhack) S.Port
Uart_TX tumpangan apa pun
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 atau 10 (untuk yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYP = 3
SERIAL4_PROTOCOL = 33
MSP_OPSI = 0 (mode pemungutan suara)
Relai(PINIO)
PINIO1, PINO1 pad, Tingkat Rendah secara default
PINIO2, Pindah kamera, C1 ON secara default
# GPIOs
PA4 PINIO1 OUTPUT GPIO(81) RENDAH //pad PIO1
PB5 PINIO2 OUTPUT GPIO(82) RENDAH //penukaran kamera
# RCx_OPTION: Opsi masukan RC
28 Rele On/Off
34 Relay2 Hidup/Mati
35 Relai3 On/Off
36 Relai4 Hidup/Matikan
misalnya
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relai Nyala/Mati, Gunakan CH7 dari Transmitter untuk mengontrol Tingkat Rendah/Tinggi PIO1
RELAY_PIN2 82 //Kamera switch GPIO
RC8_OPTION 34 //Relay2 On/Off, Gunakan CH8 pada Transmitter untuk mengontrol level tinggi/rendah pada koneksi PB5
The configured feature will be triggered when the auxiliary switch’s pwm value becomes higher than 1800. It will be deactivated when the value falls below 1200.
Check the pwm value sent from the transmitter when the switch is high and low using the Mission Planner’s Initial Setup >> Mandatory Hardware >> Radio Calibration screen. If it does not climb higher than 1800 or lower than 1200, it is best to adjust the servo end points in the transmitter.
TIPS
- F405-TE memiliki INAV fw yang telah terpasang sebelumnya untuk kontrol kualitas
- atur laju PWM ESC BLHeli32 ke 48 kHz atau lebih tinggi di BLHeliSuite
ArduPilot
ArduPilot fw, peringatan "Internal errors 0x4000 l:213 spi_fail", tolong atur LOG_BACKEND_TYPE = 1 (File) untuk pencatatan SD card. Unduh firmware ArduPilot dari DI SINI.
INAV
Dengan firmware INAV, DSHOT tidak dapat bekerja pada S3, S5, S7 karena bentrok DMA, harap gunakan ONESHOT atau MULTISHOT dan kalibrasi rentang ESC PWM.
Unduh firmware INAV 4.1.x dari situs web Matck. INAV5.x atau yang lebih baru langsung dari konfigurator INAV
BetaFlight
Jika menggunakan buzzer pasif 5V, ketikkan "set beeper_frequency = 2500" di CLI.
Target MATEKF405TE_SD didukung sejak BF4.4.
Atur dshot_bitbang = ON saat menggunakan X6 dan X8 DSHOT.
Anda dapat mengunduh BF 4.3 langsung dari konfigurator BF, BF 4.2.x dari Di sini.
Barometer SPL06-001 tidak didukung oleh Betaflight.