รายละเอียดที่แม่นยำ:
คุณสมบัติ FC
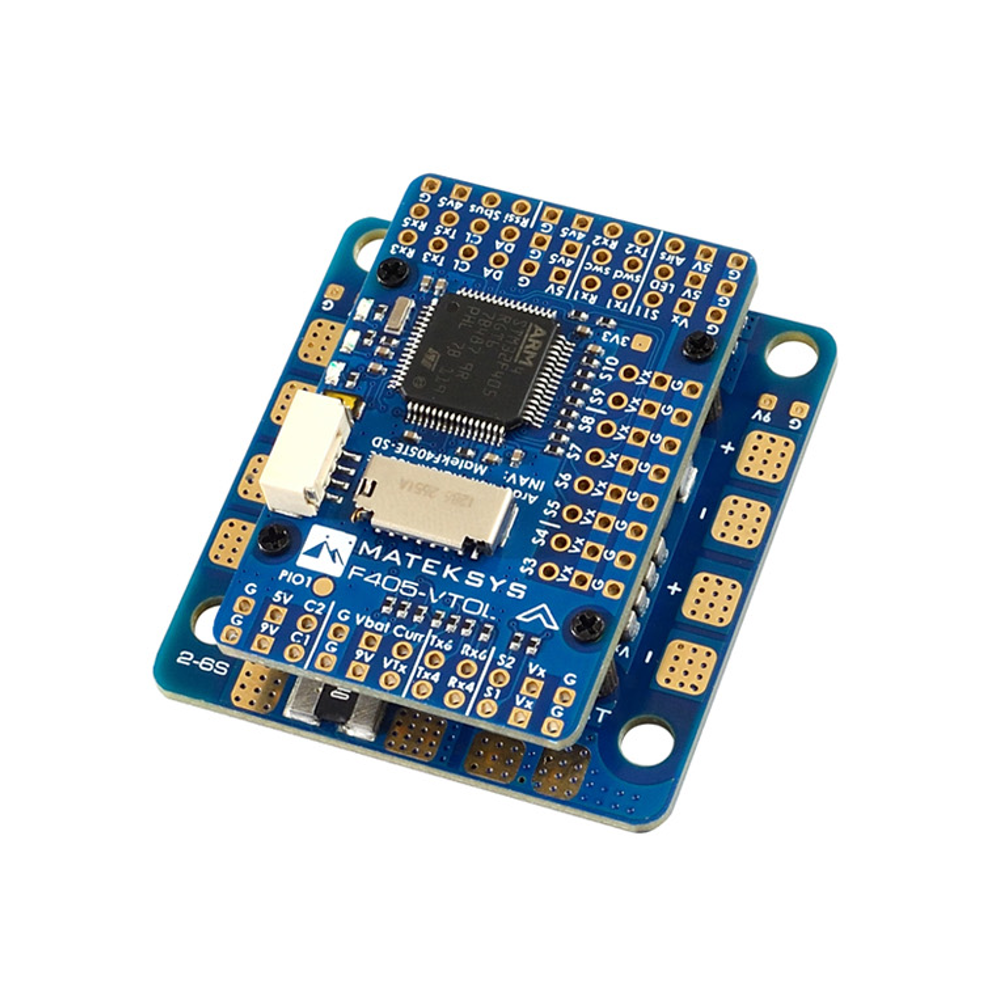
MCU: STM32F405RGT6, 168MHz , 1MB แฟลช
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
กล่องดำ: ช่องการ์ด MicroSD
6x UARTs, 1x Softserial_Tx ตัวเลือก (INAV)
12x การแยกเอาออก PWM
1x I2C
4x ADC (VBAT, กระแสไฟฟ้า, RSSI, ความเร็วอากาศ)
1x โค้งเปียโนสำรอง
ตัวขยาย USB / Beep ด้วย Type-C (USB2.0)
อินเวอร์เตอร์แบบภายในบน UART2-RX สำหรับการนำเข้า SBUS
การนำเข้ากล้องคู่ที่สามารถเปลี่ยนได้
ซอฟต์แวร์ FC
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 หรือใหม่กว่า)
ซอฟต์แวร์สำหรับคอนโทรลเลอร์การบิน คลิกที่นี่
PDB
ช่วงแรงดันขาเข้า: 6.8~30V (2~6S LiPo)
ตัวต้านทานความรู้สึก: 100A ต่อเนื่อง 220A สูงสุด
5x แผ่นพาเดิม ESC รวม 100A ต่อเนื่อง
สนับสนุนการโหลดต่อเนื่องสูงสุดถึง 100A บนพื้นฐาน ESC ใกล้ตัวตรวจวัดกระแสปัจจุบัน
สนับสนุนการโหลดต่อเนื่องได้สูงสุดถึง 30A และช่วงสูงสุดของ 50A บนแต่ละหน้าแผ่น ESC ของ Quadcopter
ตัวอนุกรมไฟฟ้าแบตเตอรี่ 1K:20K (มาตราส่วน 2100 ใน INAV, BATT_VOLT_MULT 21.0 ใน ArduPilot)
เซ็นเซอร์ปัจจุบัน: 220A, 3.3V ADC (ลาดับ 150 ใน INAV, 66.7 A/V ใน ArduPilot)
BEC 5V ผลลัพธ์
ออกแบบสำหรับคอนโทรลเลอร์ของเครื่องบิน, เครื่องรับ, OSD, กล้อง, บัซเซอร์, LED_Strip 2812, บัซเซอร์, โมดูล GPS, ความเร็วของอากาศ
กระแสต่อเนื่อง: 2 แอมป์
BEC 9V /12V ผลลัพธ์
ออกแบบสำหรับวิดีโอตัวส่ง, กล้อง, กิมบอล เป็นต้น
กระแสต่อเนื่อง: 2 แอมป์
ตัวเลือก 12V ด้วย Jumper pad
สำหรับการลดแรงดัน 9V/12V ที่เสถียร แรงดันนำเข้าควร > แรงดันเอาต์พุต +1V
เอาต์พุต BEC Vx
ออกแบบสำหรับเซอร์โว
สามารถปรับแรงดันได้ ค่าเริ่มต้นคือ 5V หรือ 6V หรือ 7.2V ผ่านการตั้งค่าแบบจัมเปอร์
กระแสต่อเนื่อง: 8 แอมป์ 10A สูงสุด
สำหรับเอาต์พุต Vx ที่เสถียร ควรมีแรงดันเข้าสูงกว่า Vx แรงดัน +1V
BEC 3.3V ผลลัพธ์
ออกแบบสำหรับโมดูลบาร์โร/เข็มทิศและอุปกรณ์รอบข้าง 3.3V ภายนอก
เรกูลาเตอร์เชิงเส้น
กระแสต่อเนื่อง: 200mA
กายภาพ
การติดตั้ง: 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
ขนาด: 45 x 42 x 15 มม.
น้ำหนัก: 25 กรัม พร้อมอะแดปเตอร์ USB/บัซเซอร์
รวมถึง
1x F405-VTOL
ตัวขยาย USB(Type-C)/Beep (โบ้เซอร์แบบเจาะจง) 1x ตัว + สาย JST-SH-6P เป็น 20 ซม. ไปยัง JST-SH-6P สำหรับตัวขยาย USB
สาย 1x 20cm JST-GH-4P ถึง JST-GH-4P สำหรับพอร์ต I2C
1x คอนเดนเซอร์ Rubycon ZLH 35V 470uF
ดูพอนต์ 2.54 ขา (บอร์ดจัดส่งยังไม่ได้ผลัดใส่)
เค้าโครง

การต่อสาย VTOL (ArduPlane)
การเชื่อมต่อเครื่องบินปกติ (INAV)
การทำแผนที่ INAV
ปิเนียว
พินไอโอ1 / พินไอโอ1 แผ่น, ระดับต่ำตามค่าเริ่มต้น, ระดับต่ำ / ระดับสูงที่สามารถสลับด้วย Mode-USER1
ปิเนียว2 สำหรับสลับการนำเข้ากล้องด้วยโหมด USER2
เคล็ดลับ
F405-VTOL มี INAV fw ที่พร้อมโหลดล่วงหน้าสำหรับ QC
ดาวน์โหลด INAV (Target MATEKF405TE_SD) fw 5.x หรือใหม่กว่าโดยตรงจาก INAV configurator 5.x หรือใหม่กว่า
การแม็ป ArduPilot
ทางเลือกฟร์สกี้สมาร์ทพอร์ต
สัญญาณ S.Port ที่ไม่พลิก (ถูกแฮ็ก)
Uart_TX สำรองใดๆ
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 หรือ 10 (สำหรับ yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (โหมดการสำรวจ)
รีเลย์ (ปิเนียว)
ปิเนียว1 การเชื่อมต่อ PIO1, ระดับต่ำเป็นค่าเริ่มต้น
ปิเนียว2, สวิตช์กล้อง, C1 เปิดใช้งานตามค่าเริ่มต้น
# GPIOs
PA4 ปิเนียว1 OUTPUT GPIO(81) ต่ำ //PIO1 แผ่น
PB5 ปิเนียว2 OUTPUT GPIO(82) ต่ำ //สวิตช์กล้อง
# RCx_OPTION: ตัวเลือก RC อินพุต
28 เปิด/ปิดรีเลย์
34 เรลย์2 เปิด/ปิด
35 เรลย์3 เปิด/ปิด
36 รีเลย์ 4 เปิด/ปิด
เช่น
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //เปิด/ปิดรีเลย์, ใช้ CH7 ของตัวส่งเพื่อควบคุมระดับต่ำ/สูงของ PIO1
RELAY_PIN2 82 //สวิทช์กล้อง GPIO
RC8_OPTION 34 //เปิด / ปิดรีเลย์2 ใช้ CH8 ของตัวส่งสัญญาณเพื่อควบคุมระดับสูง / ต่ำบนแผ่น PB5
คุณลักษณะที่กำหนดค่าจะถูกกระตุ้นเมื่อค่า pwm ของสวิตช์รองกลางสูงกว่า 1800 เมื่อค่าลงต่ำกว่า 1200 จะถูกปิดใช้งาน
ตรวจสอบค่า pwm ที่ส่งมาจากตัวส่งเมื่อสวิตช์อยู่ในสถานะสูงและต่ำโดยใช้หน้าจอการแปรผันรัศมีวิทยุในหัวข้อการติดตั้งเริ่มต้น >> ฮาร์ดแวร์ที่ต้องการ >> สู่การติดตั้งระบบพลานนิ่งว่าง. หากมีค่าที่ไม่สูงกว่า 1800 หรือต่ำกว่า 1200 การปรับจุดปลายของเซอร์โวในตัวส่งจะเป็นการปรับแต่งที่ดีที่สุด
เกร็ดความรู้
F405-VTOL มี INAV fw ที่พร้อมโหลดล่วงหน้าสำหรับ QC
เป้าหมาย MATEKF405TE_SD ไม่ได้รับการระบุใน INAV configurator 4.x.x รองรับโดย INAV5.0 หรือใหม่กว่านั้น
ArduPilot fw, 'Internal errors 0x4000 l:213 spi_fail' คำเตือน โปรดตั้งค่า LOG_BACKEND_TYPE = 1 (File) สำหรับการบันทึกบน SD card ค่ะ