Des détails précis:
Spécifications:
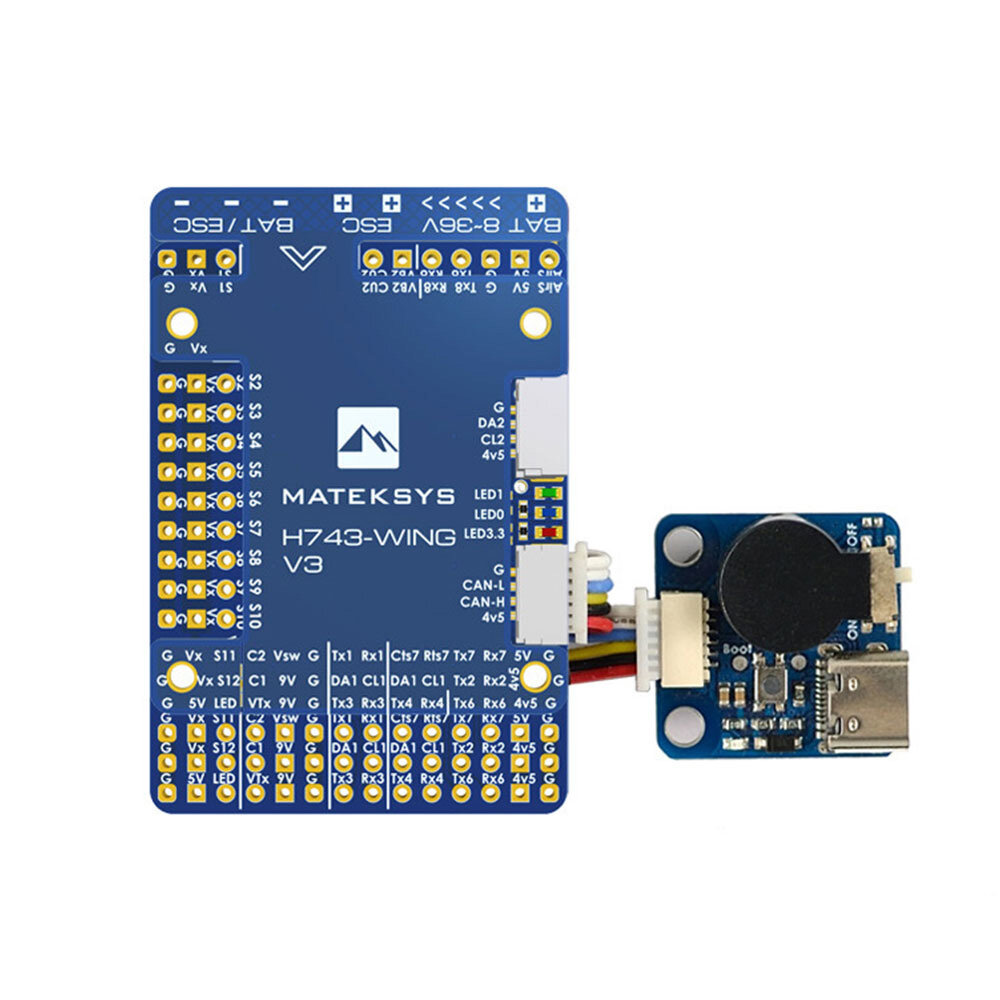
Nom de marque: Matek
Nom de l'article: H743-WING V3
Guide de démarrage rapide, Cliquez ici
Spécifications du FC:
MCU: STM32H743VIT6, 480MHz, 1MB de RAM, 2MB de Flash
IMU: MPU6000 (SPI1) et ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: Emplacement de carte MicroSD (SDIO)
7x Uarts (1,2,3,4,6,7,8) avec inversion intégrée.
13x souties PWM (y compris la broche 'LED').
2x I2C.
1x CAN.
6x ADC (VBAT, courant, RSSI, Vitesse atmosphérique analogique, VB2, CU2).
3x LED pour l'état du FC (bleu, rouge) et indicateur de 3.3V (rouge).
1x dérivation SPI3.
Extension USB/Beep avec Type-C(USB2.0)
Changement de sources d'entrée de caméra double
Interrupteur d'alimentation 5V/9V(12V) pour la caméra/VTX
Capteur de courant haute précision (90A en continu, 220A en crête)
Capteur de tension de batterie : 1K:10K (Échelle 1100 dans INAV, BATT_VOLT_MULT 11.0 dans ArduPilot)
Diviseur de tension ADC VB2 : 1K:20K
Diviseur de tension ADC AirSpeed : 20K:20K
Puissance statique 160mA à 5V
FC Firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Firmware Cliquez ici
PDB
Plage de tension d'entrée: 8 ~ 36V (3 ~ 8S LiPo) avec protection TVS
2x tampons d'alimentation ESC
Capteur de courant: 220A, 3.3V ADC (Échelle 150 dans INAV, 66.7 A/V dans ArduPilot)
Résistance de détection: 90A en continu, 220A en crête.
Soutie BEC 5V
Conçu pour le contrôleur de vol, le récepteur, l'OSD, la caméra, le buzzer, la bande LED 2812, le module GPS, la vitesse de l'air
Soutie 5,15 +/- 0,1 V CC
Courant continu 2 ampères, pic de 3 A
Soutie BEC 9V / 12V
Conçu pour un émetteur vidéo, une caméra, un stabilisateur, etc.
Courant continu 2 Ampères, crête de 3A
Option 12V avec pad de cavalier
Soutie BEC Vx
Conçu pour les servomoteurs
Tension réglable, 5V par défaut, 6V ou 7,2V via cavalier
Courant continu 8 Ampères, 10A crête
Soutie BEC 3.3V
Régulateur linéaire
Courant continu: 200mA
Physique
Montage : 30,5 x 30,5 mm, Φ4 mm avec œillets Φ3 mm
Dimensions: 54 x 36 x 13 mm
Poids : 30g avec rallonge USB
Foufait comprenant
1x H743-AILE
1x USB (Type-C)/ Extendeur de bip (Buzzer passif)
Câble JST-SH-6P vers JST-SH-6P de 1x 20 cm pour prolongateur USB.
Câble 2x 20cm JST-GH-4P vers JST-GH-4P pour pout CAN et I2C
1x condensateur Rubycon ZLH 35V 470uF
Broches Dupont 2.54 (La carte est expédiée non soudée)
Cartographie INAV

ENTRÉE RC
La broche Rx6, qui est par défaut assignée à une entrée de minuterie, peut être utilisée pour tous les protocoles de réception pris en charge par ArduPilot, à l'exception de CRSF qui nécessite une véritable connexion UART. Cependant, les protocoles bidirectionnels incluant la télémétrie, tels que SRXL2 et FPout, lousqu'ils sont connectés de cette manière, ne fourniront que RC sans télémétrie.
Pour permettre aux récepteurs CRSF et télémétrie embarquée d'être disponibles dans les récepteurs Fpout, CRSF et SRXL2, la broche Rx6 peut également être configurée pour être utilisée comme broche RX UART réelle pour une utilisation avec des systèmes bidirectionnels en réglant BRD_ALT_CONFIG pour que "1" devienne la broche d'entrée RX du pout SERIAL7.
Avec cette option, SERIAL7_PROTOCOL doit être réglé sur "23", et:
PPM n'est pas suppouté.
SBUS/DSM/SRXL se connecte à la broche Rx6, mais SBUS nécessite que SERIAL7_OPTIONS être réglé sur "3".
* FPout nécessite une connexion à Tx6 et SERIAL7_OPTIONS être configuré sur "7". Si la télémétrie ne fonctionne pas, essayez de configurer SERIAL7_OPTIONS = 135.
* CRSF nécessite également une connexion Tx6, en plus de Rx6, et fournit automatiquement la télémétrie. Réglez SERIAL7_OPTIONS à "0".
* SRXL2 nécessite une connexion à Tx6 et fournit automatiquement la télémétrie. Définir SERIAL7_OPTIONS à "4".
* Tout UART peut être utilisé pour les connexions du système RC dans ArduPilot, et est compatible avec tous les protocoles sauf PPM. Voir Systèmes de contrôle à distance pour plus de détails.
Relais ArduPilot (PINIO)
Caméra-1 et Vsw activés par défaut
Assurez-vous que les 2 caméras sont configurées avec le même foumat vidéo, soit PAL, soit NTSC.
#
- PD10 PINIO1 SORTIE GPIO(81) //Interrupteur d'alimentation du pad Vsw
PD11 PINIO2 SORTIE GPIO(82) //Interrupteur de caméra
# RCx_OPTION: Option d'entrée RC
- 28 Relais Marche/Arrêt
- 34 Relais2 Marche/Arrêt
- 35 Relais 3 On/Off
- 36 Relais4 Marche/Arrêt
par exemple
BROCHE_RELAY 81 //Vsw GPIO
- RC7_OPTION 28 //Relais On/Off, Utilisez CH7 de l'émetteur pour basculer Vsw
RELAY_PIN2 82 // Commutateur de caméra GPIO
- RC8_OPTION 34 //Relais2 On / Off, Utilisez CH8 de l'émetteur pour changer de caméra
ou
- RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Relais3 Marche/Arrêt, Utilisez CH9 de l'émetteur pour changer Vsw
RELAY_PIN4 82 //GPIO de commutation de caméra
- RC10_OPTION 36 //Relais4 On / Off, Utilisez CH10 de l'Émetteur pour changer de caméra
La fonction configurée sera déclenchée lousque la valeur pwm de l'interrupteur auxiliaire devient supérieure à 1800. Elle sera désactivée lousque la valeur tombe en dessous de 1200.
Vérifiez la valeur pwm envoyée par l'émetteur lousque le commutateur est en position haute et basse en utilisant l'écran de calibration radio dans la configuration initiale >> Matériel obligatoire >> Planificateur de mission. Si elle ne dépasse pas 1800 ou ne descend pas en dessous de 1200,il est préférable d'ajuster les points d'extrémité du servo dans l'émetteur.
Conseils et notes
ArduPilot
La plage de capteur de courant actuel est de 220A sur H743-WING-V2/V3, assurez-vous de régler BATT_AMP_PERVLT à 66,7
* avec ArduPilot 4.1 ou supérieur, définir INS_ENABLE_MASK sur 7 ou sur la valeur par défaut 127.
Veuillez télécharger avion 4.2.0 ou ultérieurFirmware ArduPilot pour H743-WING-V3
Il est recommandé d'utiliser STM32CubeProgrammer pour effacer le MCU et télécharger le micrologiciel. Vérifiez ce blog http://www.mateksys.com/?p=6905
INAV
La plage de capteur de courant actuel est de 220A sur H743-WING-V2/V3, assurez-vous de régler Échelle de mesure de courant jusqu'à 150
* H743-WING-V3 n'est pas pris en charge par INAV4.1 téléchargé depuis le configurateur. veuillez télécharger. inav_4.1.0_MATEKH743_42688 du site web.
* À partir de INAV5.0, ils partageront le même firmware.
Autres
Si les ESC que vous utilisez n'ont pas suffisamment de condensateurs intégrés, un condensateur électrolytique à faible ESR est nécessaire pour réduire le bruit de l'ESC.