Moteur pas à pas 4 phases 5 fils en courant continu 5V 28YBJ-48 avec carte de commande ULN2003
US$3.99
Une partie de la critique a été traduite automatiquement.
Tried this with an Arduino Uno using the MotorKnob example sketch http://arduino.cc/en/Tutorial/MotorKnob Works fine and the 64:1 gearbox gives fairly high output torque. I found by experiment that the connection to Arduino is not obvious: Arduino pin 8 to in 1 (motor blue wire), pin 9 to in3 (motor yellow), pin 10 to in 2 (motor pink), pin 11 to in 4 (motor orange). My first attempt connecting the wires in sequence (8 to in1, 9 to in2 etc) resulted in the motor only turning in one direction! The motor draws about 250 mA at 5V so best to use a separate supply, remember to connect the 0V to one of the Arduino GND pins.
Very good Nagyon jó





Instead of swapping connections around as suggested by other reviewers, I kept the connections in order and edited the sketch. I am using digital outputs D5 to D8 so used this pin assignment: #define motorPin1 5 #define motorPin2 7 #define motorPin3 6 #define motorPin4 8 I find the motor works at 15 RPM but does not work at 20 RPM; this is to be expected for a stepper motor. Torque is surprisingly good. It is not clear what the jumper adjacent to the +5V header pin is for.
Bien emballé et est arrivé dans le temps annoncé. Les tableaux de commande du moteur sont emballés individuellement dans des sacs en plastique résistant à l'électricité statique, ce qui est une belle touche. Tout semble être exactement comme décrit. J'ai hâte de les installer sur le projet. Je recommanderais.




Bem emballé, répond aux attentes. Livraison internationale rapide.

Llego dentro del plazo estimado, en perfectas condiciones, sin aparentes golpes en los productos. Todo en orden.



pas tester encore mais bon materiel !!




bien



Excellent motor & controller for the price


Worked great for me on the arduino. After I used the AccelStepper Lib. (much better timing and more efficient control than the standard lib). Caveat: Only worked when I initialized the AccelStepper lib with Pin 2 and 3 swapped and Half Step Mode: AccelStepper stepper(AccelStepper::HALF4WIRE, motorPin1, motorPin3, motorPin2, motorPin4);

Moteur pas à pas 4 phases 5 fils 28YBJ-48 DC 5V avec carte pilote ULN2003

Module d'alimentation à découpage réglable LM2596 DC-DC Step Down




Module d'alimentation convertisseur élévateur réglable DC-DC 4A XL6009E1



Module d'alimentation Mini DC-DC réglable 12V 24V vers 5V 3.3V 9V 3A mini360


Carte de commande d'alimentation de nettoyeur ultrasonique AC 220V avec 2 transducteurs de 50W 40K





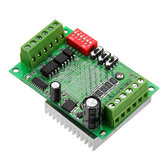
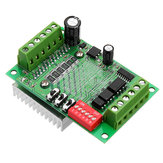
TB6560 3A CNC Router 1 Carte de pilote d'axe de moteur pas à pas







Module d'alimentation par induction ZVS Geekcreit® 5V-12V avec bobine (3 pièces)

Module d'alimentation convertisseur élévateur réglable DC-DC 3Pcs 4A XL6009E1

Module d'alimentation de chauffage par induction Geekcreit® 5V-12V ZVS avec bobine

Module d'alimentation en courant continu de 1,25V-30V de 7V-35V DC à LED


Régulateur de vitesse électronique SCR 220V 4000W pour moteur, dimmer régulateur de tension





Régulateur de vitesse du moteur électrique SCR 4000W 220V AC

Module 3pcs Mini MP1584EN DC-DC BUCK à abaissement réglable Entrée de 4.5V-28V Sortie de 0.8V-20V





Module d'alimentation haute puissance à tension et courant constants de 400W DC-DC, 3 pièces






Module régulateur de tension LM2596 DC-DC ajustable avec affichage alimentation

Module abaisseur réglable Mini MP1584EN DC-DC BUCK de 5 pièces Entrée 4.5V-28V Sortie 0.8V-20V