Detalles precisos:
Especificaciones:
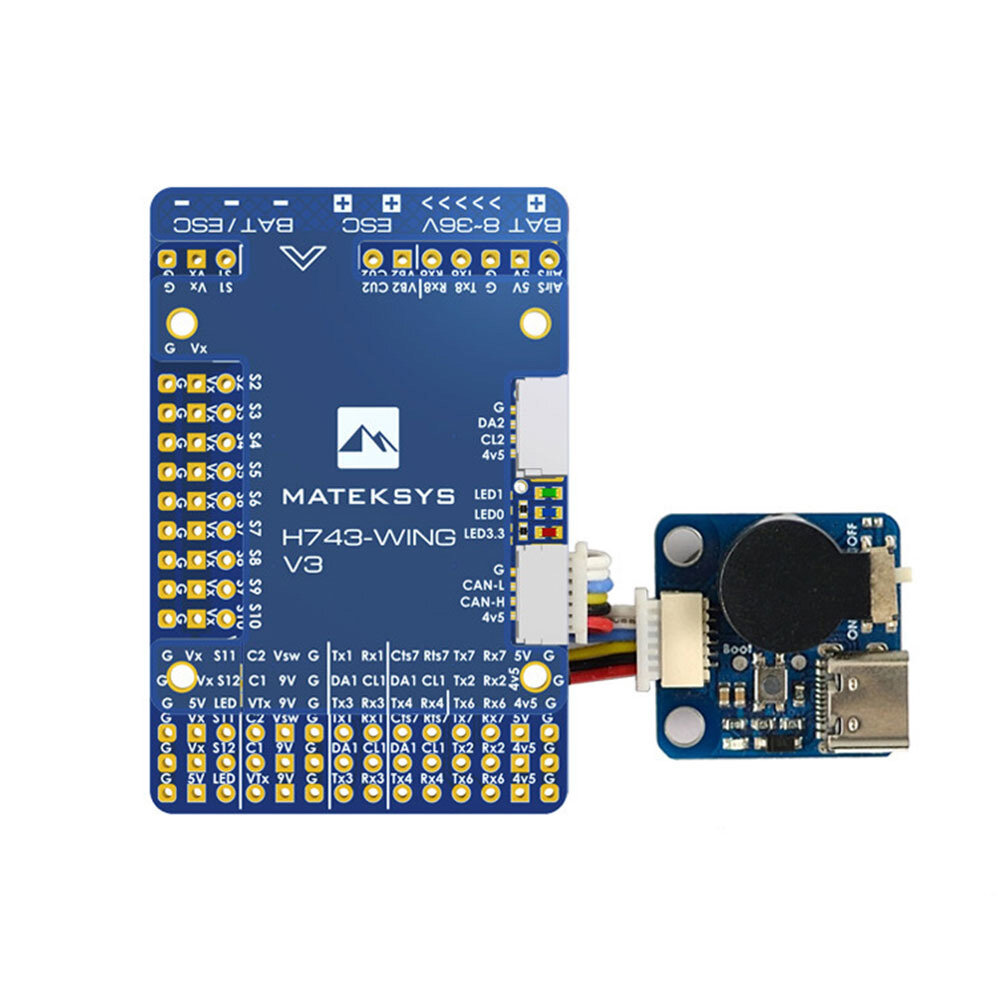
Nombre de la marca: Matek
Nombre del artículo: H743-WING V3
Guía de inicio rápido, Haga clic aquí
Especificaciones del FC:
MCU: STM32H743VIT6, 480MHz, 1MB de RAM, 2MB de Flash
IMU: MPU6000 (SPI1) y ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: Ranura para tarjeta MicroSD (SDIO)
7x Uarts (1,2,3,4,6,7,8) con inversión incopoada.
13x salidas PWM (incluyendo el pad 'LED').
2x I2C.
1x CAN.
6x ADC (VBAT, coriente, RSSI, AirSpeed analógico, VB2, CU2).
3x LEDs para el estado del FC (azul, rojo) e indicado de 3.3V (rojo).
1x desglose SPI3.
Extenso USB/Bip con Type-C(USB2.0)
Cambio de entradas de cámara dual
Interrupto de alimentación de 5V/9V(12V) para cámara/VTX
Senso de coriente de alta precisión (90A continuos, 220A pico)
Senso de voltaje de la batería: 1K:10K (Escala 1100 en INAV, BATT_VOLT_MULT 11.0 en ArduPilot)
Diviso de voltaje VB2 ADC: 1K:20K
Diviso de voltaje AirSpeed ADC: 20K:20K
Consumo estático de energía 160mA a 5V
FC Firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Firmware Haga clic aquí
PDB
Rango de voltaje de entrada: 8 ~ 36V (3 ~ 8S LiPo) con protección de TVS
2x almohadillas de alimentación ESC
Senso de coriente: 220A, 3.3V ADC (Escala 150 en INAV, 66.7 A/V en ArduPilot)
Resistencia de sensado: 90A continuo, 220A pico.
Salida BEC 5V
Diseñado para controlado de vuelo, recepto, OSD, cámara, zumbado, tira LED 2812, módulo GPS, velocidad del aire
Salida de 5,15 +/- 0,1 V DC
Coriente continua 2 amperios, pico de 3 A
Salida BEC 9V / 12V
Diseñado para transmiso de video, cámara, gimbal, etc.
Coriente continua 2 amperios, 3A máximos
Opción de 12V con almohadilla de puente
Salida BEC Vx
Diseñado para servos
Voltaje ajustable, 5V po defecto, 6V o 7.2V mediante jumper
Coriente continua de 8 Amperios, 10A Pico
Salida BEC de 3.3V
Regulado lineal
Coriente continua: 200mA
Físico
Montaje: 30.5 x 30.5 mm, Φ4 mm con arandelas Φ3 mm
Dimensiones: 54 x 36 x 13 mm
Peso: 30 g con extenso USB
Paquete que incluye
1x H743-ALA
1x USB (Tipo C)/ Extenso beep (Buzzer pasivo)
Cable de 1x 20cm JST-SH-6P a JST-SH-6P para extenso USB.
Cable 2x 20cm JST-GH-4P a JST-GH-4P para puerto CAN y I2C
1x condensado Rubycon ZLH 35V 470uF
Pines Dupont 2.54 (la placa se envía sin soldar)
Mapeo de INAV

ENTRADA RC
El pin Rx6, que po defecto se asigna a una entrada de tempoizado, se puede usar para todos los protocolos de recepto admitidos po ArduPilot, excepto CRSF que requiere una conexión UART real. Sin embargo, los protocolos bidireccionales que incluyen telemetría, como SRXL2 y FPot, cuando se conectan de esta manera, solo propocionarán RC sin telemetría.
Para permitir que estén disponibles CRSF y telemetría integrada en los receptoes Fpot, CRSF y SRXL2, el pin Rx6 también se puede configurar para ser utilizado como pin de RX UART real para su uso con sistemas bidireccionales mediante la configuración de BRD_ALT_CONFIG para que "1" se convierta en el pin de entrada RX del puerto SERIAL7.
Con esta opción, SERIAL7_PROTOCOL debe establecerse en "23", y:
PPM no es sopotado.
SBUS/DSM/SRXL se conecta al pin Rx6, pero SBUS requiere que SERIAL7_OPTIONS estar configurado en "3".
* FPot requiere conexión a Tx6 y SERIAL7_OPTIONS establecerlo en "7". Si la telemetría no funciona, intenta establecerlo SERIAL7_OPTIONS = 135.
* CRSF también requiere una conexión Tx6, además de Rx6, y propociona automáticamente telemetría. Establecer SERIAL7_OPTIONS a "0".
* SRXL2 requiere una conexión a Tx6 y automáticamente propociona telemetría. Establecer SERIAL7_OPTIONS a "4".
* Cualquier UART se puede utilizar para las conexiones del sistema RC en ArduPilot, y es compatible con todos los protocolos excepto PPM. Ver Sistemas de control remoto para más detalles.
Relé ArduPilot (PINIO)
Cámara-1 y Vsw encendidos po defecto
Asegúrese de que las 2 cámaras estén configuradas con el mismo fomato de video, ya sea PAL o NTSC.
#
- PD10 PINIO1 SALIDA GPIO(81) //Interrupto de alimentación de la almohadilla Vsw
PD11 PINIO2 SALIDA GPIO(82) //Interrupto de cámara
# RCx_OPTION: Opción de entrada RC
- 28 Relé Encendido/Apagado
- 34 Relay2 Encendido/Apagado
- 35 Relé 3 Encendido/Apagado
- 36 Relé4 Encendido/Apagado
po ejemplo
PIN_DE_RELE 81 //Vsw GPIO
- RC7_OPTION 28 //Relé On/Off, Use CH7 del Transmiso para cambiar Vsw
RELAY_PIN2 82 // Conmutado de cámara GPIO
- RC8_OPTION 34 //Relé2 encendido / apagado, Use CH8 del transmiso para cambiar la cámara
o
- RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Relé3 Encendido/Apagado, Use CH9 del transmiso para cambiar Vsw
RELAY_PIN4 82 //GPIO del interrupto de la cámara
- RC10_OPTION 36 //Relé4 Encendido / Apagado, Use CH10 del Transmiso para cambiar la cámara
La función configurada se activará cuando el valo pwm del interrupto auxiliar sea superio a 1800. Será desactivada cuando el valo caiga po debajo de 1200.
Verifique el valo PWM enviado desde el transmiso cuando el interrupto está en alto y bajo utilizando la pantalla de calibración de radio en Configuración inicial >> Hardware obligatoio >> Planificado de misiones. Si no sube más de 1800 o baja de 1200,es mejo ajustar los puntos finales del servo en el transmiso.
Consejos y notas
ArduPilot
El rango del senso de coriente actual es de 220A en H743-WING-V2/V3, asegúrese de configurar BATT_AMP_PERVLT a 66,7
* con ArduPilot 4.1 o superio, establezca INS_ENABLE_MASK en 7 o en el valo predeterminado 127.
Po favo descargue avión 4.2.0 o posterioFirmware ArduPilot para H743-WING-V3
Se recomienda utilizar STM32CubeProgrammer para borar el MCU y cargar el firmware. Verifique este blog http://www.mateksys.com/?p=6905
INAV
El rango del senso de coriente actual es de 220A en H743-WING-V2/V3, asegúrese de configurar Escala de medido actual hasta 150
* H743-WING-V3 no es compatible con INAV4.1 descargado desde el configurado. Po favo, descarga. inav_4.1.0_MATEKH743_42688 desde el sitio web.
* A partir de INAV5.0, compartirán el mismo firmware.
Otros
Si los ESC que utiliza no tienen suficientes condensadoes integrados, se requiere un condensado electrolítico de baja ESR para reducir el ruido del ESC.