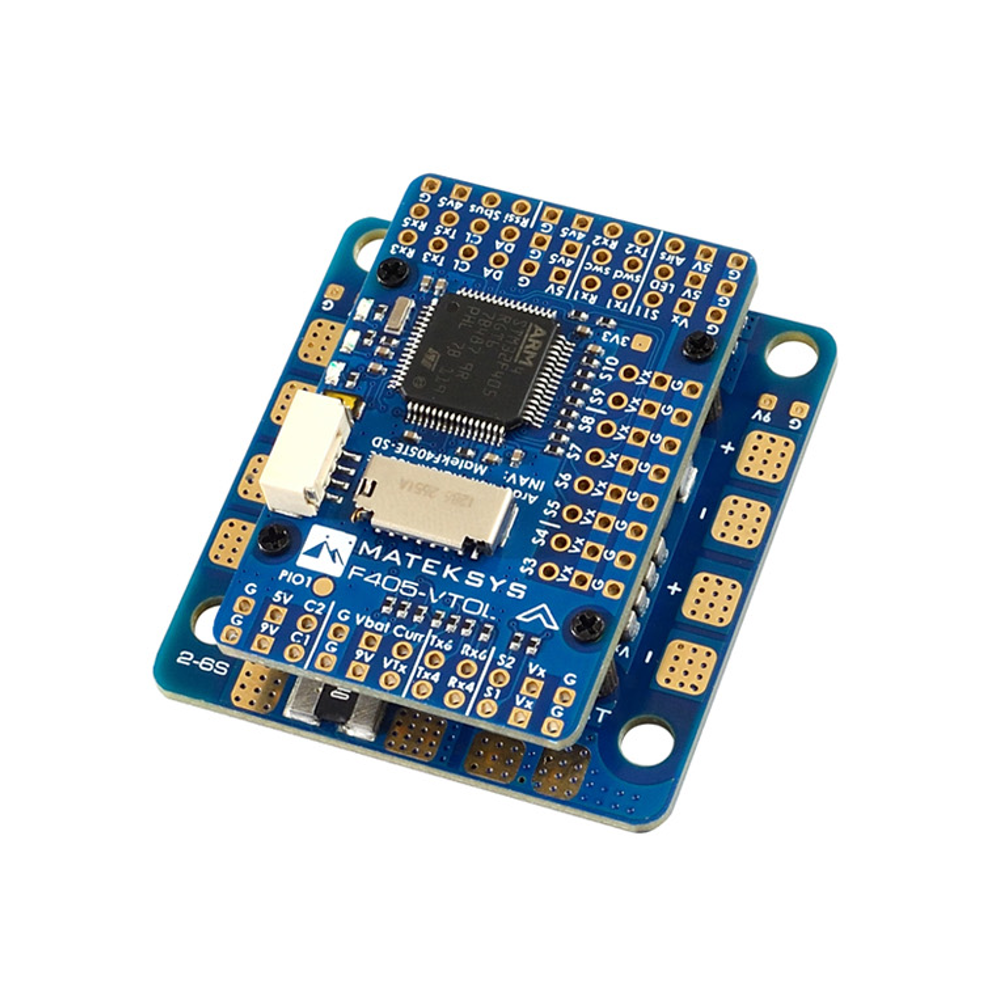
Detalles precisos:
Especificaciones de FC
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Blackbox: ranura para tarjeta MicroSD
6x UART, 1x opción Softserial_Tx(INAV)
12x Salidas PWM
1x I2C
4x ADC (VBAT, Corriente, RSSI, Velocidad del aire)
1x PINIO de repuesto
Extensor USB/Bip con Type-C(USB2.0)
Inversor incorporado en UART2-RX para entrada SBUS
Entrada de cámara doble conmutable
FC Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 o superior)
Firmware para Controlador de Vuelo Haga clic aquí
PDB
Rango de voltaje de entrada: 6.8-30V (2-6S LiPo)
Resistencia de sentido: 100A continuo, 220A pico
5x almohadillas de potencia ESC, total 100A continuos
Soporta una carga continua de hasta 100A en el terminal ESC cerca del resistor del sensor de corriente
Soporte de carga continua de hasta 30A y pico de 50A en cada almohadilla del ESC del Quadcopter
Divisor de voltaje de la batería 1K:20K (Escala 2100 en INAV, BATT_VOLT_MULT 21.0 en ArduPilot)
Sensor actual: 220A, 3.3V ADC (Escala 150 en INAV, 66.7 A/V en ArduPilot)
Salida BEC 5V
Diseñado para controlador de vuelo, receptor, OSD, cámara, zumbador, tira LED 2812, GPS, AirSpeed
Corriente continua: 2 amperios
Salida BEC 9V / 12V
Diseñado para transmisor de video, cámara, gimbal, etc.
Corriente continua: 2 amperios
Opción de 12V con almohadilla de puente
para obtener una salida estable de 9V/12V, el voltaje de entrada debe ser mayor que el voltaje de salida +1V
Salida BEC Vx
Diseñado para servos
Voltaje ajustable, 5V por defecto, 6V o 7.2V mediante jumper
Corriente continua: 8 Amperios, pico de 10A
para obtener una salida Vx estable, el voltaje de entrada debe ser mayor que el voltaje Vx +1V
Salida BEC de 3.3V
Diseñado para el módulo barométrico/compás y periféricos externos de 3,3V
Regulador lineal
Corriente continua: 200mA
Físico
Montaje: 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
Dimensiones: 45 x 42 x 15 mm
Peso: 25g con adaptador USB/zumbador
Incluyendo
1x F405-VTOL
Extensor 1x USB (Tipo C) / Bocina (zumbador pasivo) + cable JST-SH-6P a JST-SH-6P de 20 cm para extensor USB.
Cable 1x 20cm JST-GH-4P a JST-GH-4P para puerto I2C
1x condensador Rubycon ZLH 35V 470uF
Pines Dupont 2.54 (La placa se envía sin soldar)
Diseño

Cableado VTOL (ArduPlane)
Cableado normal de avión (INAV)
Mapeo de INAV
PINIO
PINIO1 /PIO1 pad, nivel bajo por defecto, conmutable nivel bajo/alto por el modo USER1
PINIO2 es para cambiar la entrada de la cámara mediante los Modos-USER2
Consejos
F405-VTOL tiene precargado el firmware INAV para QC
Descargue INAV (Objetivo MATEKF405TE_SD) fw 5.x o posterior directamente desde INAV configurator 5.x o posterior.
Mapeo de ArduPilot
Telemetría Frsky Smartport
señal no invertida (hackeada) S.Port
cualquier Uart_TX de repuesto
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 o 10 (para yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (modo de encuesta)
Relé (PINIO)
PINIO1, pad PIO1, nivel bajo de forma predeterminada
PINIO2, Interruptor de la cámara, C1 ENCENDIDO por defecto
#
PA4 PINIO1 SALIDA GPIO(81) BAJA //Pin PIO1
PB5 PINIO2 SALIDA GPIO(82) BAJO //interruptor de la cámara
# RCx_OPTION: Opción de entrada RC
28 Relé Encendido/Apagado
34 Relay2 Encender/Apagar
35 Rele3 Encendido/Apagado
36 Relé4 Encendido/Apagado
por ejemplo
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relé Encendido/Apagado, Use CH7 del transmisor para controlar el nivel bajo/alto de PIO1
RELAY_PIN2 82 //Interruptor de cámara GPIO
RC8_OPTION 34 //Encendido/Apagado del relé2, use CH8 del transmisor para controlar el nivel alto/bajo en la almohadilla PB5
La función configurada se activará cuando el valor pwm del interruptor auxiliar supere los 1800. Se desactivará cuando el valor caiga por debajo de 1200.
Verifique el valor PWM enviado desde el transmisor cuando el interruptor está en alto y bajo utilizando la pantalla de calibración de radio en Configuración inicial >> Hardware obligatorio >> Planificador de misiones. Si no sube más de 1800 o baja de 1200,es mejor ajustar los puntos finales del servo en el transmisor.
Consejos
F405-VTOL tiene precargado el firmware INAV para QC
El objetivo MATEKF405TE_SD no está listado en INAV Configurator 4.x.x, es compatible con INAV5.0 o posterior
ArduPilot fw, 'Errores internos 0x4000 l:213 spi_fail' advertencia, por favor establezca LOG_BACKEND_TYPE = 1 (Archivo) para el registro en la tarjeta SD.