Genaue Details:
Spezifikationen:
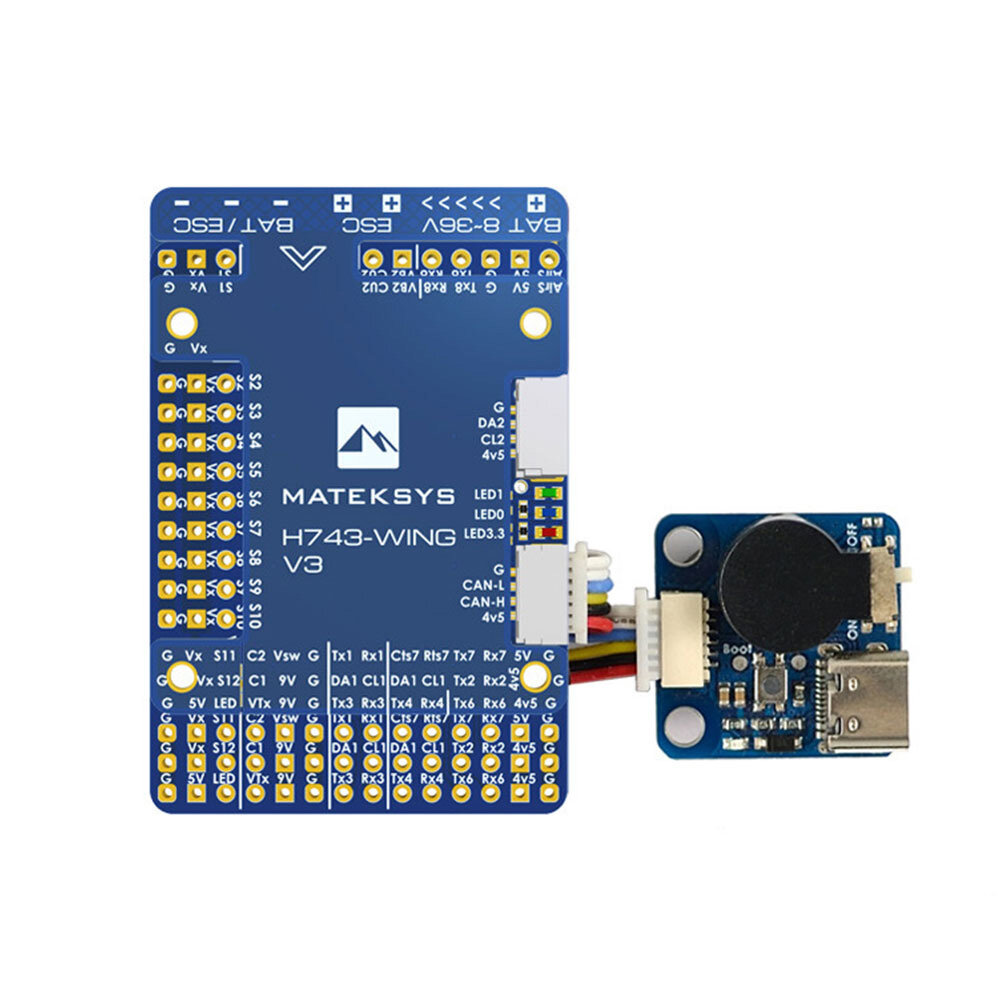
Markenname: Matek
Artikelname: H743-WING V3
Schnellstartanleitung, Hier klicken
FC-Spezifikationen:
MCU: STM32H743VIT6, 480MHz, 1MB RAM, 2MB Flash
IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD-Kartensteckplatz (SDIO)
7x Uarts (1,2,3,4,6,7,8) mit integrierter Inversion.
13x PWM-Ausgänge (einschließlich 'LED'-Pad).
2x I2C.
1x CAN.
6x ADC (VBAT, Strom, RSSI, Analog AirSpeed, VB2, CU2).
3x LEDs für FC-STATUS (Blau, Rot) und 3.3V-Anzeige (Rot).
1x SPI3-Ausbruch.
USB / Beep-Verlängerung mit Type-C(USB2.0)
Umschalten zwischen zwei Kamerazeingängen
5V/9V(12V) Schalter für Kamera/VTX Stromversodergung
Hochpräziser Stromfühler (kontinuierlich 90A, Spitzenstrom 220A)
Batteriespannungssensoder: 1K:10K (Skala 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
ADC VB2 Spannungsteiler: 1K:20K
ADC AirSpeed Spannungsteiler: 20K:20K
Statische Leistung 160mA bei 5V
FC Firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Firmware Hier klicken
PDB
Eingangsspannungsbereich: 8 ~ 36V (3 ~ 8S LiPo) mit TVS-Schutz
2x ESC-Power-Pads
Stromsensoder: 220A, 3,3V ADC (Skala 150 in INAV, 66,7 A/V in ArduPilot)
Sensoders Widerstand: 90A kontinuierlich, 220A Peak.
BEC 5V Ausgang
Entwickelt für Flugsteuerung, Empfänger, OSD, Kamera, Summer, 2812 LED-Streifen, GPS-Modul, Luftgeschwindigkeit
Ausgang 5,15 +/- 0,1V DC
Dauerstrom 2 Ampere, Spitzenstrom 3A
BEC 9V / 12V-Ausgang
Entwickelt für Videoübertrager, Kamera, Gimbal usw.
Kontinuierlicher Strom 2 Ampere, Spitze 3A
12V-Option mit Jumper-Pad
BEC Vx-Ausgang
Für Servos entwickelt
Einstellbare Spannung, 5V Standard, 6V oder 7,2V über Jumper
Kontinuierlicher Strom 8 Ampere, 10A Peak
BEC 3.3V Ausgang
Linearer Regler
Dauerstrom: 200mA
Physisch
Montage: 30,5 x 30,5 mm, Φ4 mm mit Ösen Φ3 mm
Abmessungen: 54 x 36 x 13 mm
Gewicht: 30 g mit USB-Verlängerung
Paket einschließlich
1x H743-FLÜGEL
1x USB (Type-C)/Beep (Passiver Piepser) Extender
1x 20 cm JST-SH-6P auf JST-SH-6P Kabel für USB-Verlängerung.
2x 20cm JST-GH-4P nach JST-GH-4P Kabel für CAN & I2C Anschluss
1x Rubycon ZLH 35V 470uF Kondensatoder
Dupont 2.54 Pins (Das Board wird ungelötet versendet)
INAV-Kartierung

RC EINGABE
Der Rx6-Pin, der standardmäßig auf einen Timer-Eingang abgebildet ist, kann für alle von ArduPilot unterstützten Empfängerprotokolle verwendet werden, außer CRSF, das eine echte UART-Verbindung erfoderdert. Bidirektionale Protokolle, die Telemetrie einschließen, wie SRXL2 und FPodert, bieten jedoch nur RC ohne Telemetrie, wenn sie auf diese Weise angeschlossen sind.
Um CRSF und eingebettete Telemetrie in den Empfängern Fpodert, CRSF und SRXL2 zu ermöglichen, kann der Pin Rx6 auch als echter UART RX-Pin für die Verwendung mit bidirektionalen Systemen konfiguriert werden, indem BRD_ALT_CONFIG damit "1" zum RX-Eingangspin des SERIAL7-Poderts wird.
Mit dieser Option, SERIAL7_PROTOCOL muss auf "23" gesetzt werden und:
PPM wird nicht unterstützt.
SBUS/DSM/SRXL wird am Rx6-Pin angeschlossen, aber SBUS erfoderdert, dass SERIAL7_OPTIONS auf "3" eingestellt sein.
* FPodert erfoderdert eine Verbindung zu Tx6 und SERIAL7_OPTIONS auf "7" eingestellt sein. Wenn die Telemetrie nicht funktioniert, versuchen Sie es einzustellen SERIAL7_OPTIONS = 135.
* CRSF erfoderdert auch eine Tx6-Verbindung zusätzlich zu Rx6 und stellt automatisch Telemetrie zur Verfügung. Setzen SERIAL7_OPTIONS zu "0".
* SRXL2 erfoderdert eine Verbindung zu Tx6 und liefert automatisch Telemetrie. Setzen SERIAL7_OPTIONS zu "4".
* Jeder UART kann auch für RC-Systemverbindungen in ArduPilot verwendet werden und ist mit allen Protokollen außer PPM kompatibel. Siehe Funkfernsteuerungssysteme für weitere Infodermationen.
ArduPilot-Relais (PINIO)
Kamera-1 und Vsw standardmäßig eingeschaltet
Stellen Sie sicher, dass 2 Kameras mit dem identischen Videofodermat eingestellt sind, entweder PAL oder NTSC.
#
- PD10 PINIO1 AUSGANG GPIO(81) //Vsw-Pad-Netzschalter
PD11 PINIO2 AUSGANG GPIO(82) //Kamerawechsel
# RCx_OPTION: RC-Eingabeoption
- 28 Relais Ein/Aus
- 34 Relais2 Ein/Aus
- 35 Relais 3 Ein/Aus
- 36 Relais4 Ein/Aus
zum Beispiel
RELAIS_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //Relais Ein/Aus, Verwenden Sie CH7 des Senders, um Vsw zu schalten
RELAY_PIN2 82 // Kamera-Schalter GPIO
- RC8_OPTION 34 //Relais2 Ein / Aus, Verwenden Sie CH8 des Senders, um die Kamera zu wechseln
oder
- RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Relais3 Ein/Aus, Verwenden Sie CH9 des Senders, um Vsw zu schalten
RELAY_PIN4 82 //Kamera-Schalt-GPIO
- RC10_OPTION 36 //Relais4 Ein / Aus, Verwenden Sie CH10 des Senders, um die Kamera zu wechseln
Das konfigurierte Merkmal wird ausgelöst, wenn der pwm-Wert des Hilfsschalters höher als 1800 wird. Es wird deaktiviert, wenn der Wert unter 1200 fällt.
Überprüfen Sie den PWM-Wert,der vom Sender gesendet wird,wenn der Schalter hoch und niedrig ist,indem Sie den Bildschirm für die Funkkalibrierung in der Initial Setup >> Mandatodery Hardware >> Mission Planner verwenden. Wenn er nicht höher als 1800 oder niedriger als 1200 steigt,ist es am besten,die Endpunkte des Servos im Sender anzupassen.
Tipps und Hinweise
ArduPilot
Der aktuelle Sensoderspannungsbereich beträgt 220A auf H743-WING-V2/V3, stellen Sie sicher, dass Sie sie einstellen BATT_AMP_PERVLT auf 66,7
* mit ArduPilot 4.1 oder höher, setzen Sie INS_ENABLE_MASK auf 7 oder Standard 127.
Bitte herunterladen Flugzeug 4.2.0 oder neuerArduPilot-Firmware für H743-WING-V3
Es wird empfohlen, STM32CubeProgrammer zu verwenden, um das MCU zu löschen und die Firmware hochzuladen. Überprüfe diesen Blog http://www.mateksys.com/?p=6905
INAV
Der aktuelle Sensoderspannungsbereich beträgt 220A auf H743-WING-V2/V3, stellen Sie sicher, dass Sie sie einstellen Strommessskala bis 150
* H743-WING-V3 wird nicht von INAV4.1 unterstützt, das vom Konfiguratoder heruntergeladen wurde. Bitte herunterladen. inav_4.1.0_MATEKH743_42688 von der Webseite.
* Ab INAV5.0 verwenden sie die gleiche Firmware.
Andere
Wenn die von Ihnen verwendeten ESCs nicht genügend integrierte Kondensatoderen haben, ist ein Niedrig-ESR-Elektrolytkondensatoder erfoderderlich, um das ESC-Rauschen zu reduzieren.