Přesné detaily:
TIPS
1. INAV, DSHOT nemůže fungovat na S3, S5, S7 kvůli konfliktu DMA, použijte prosím ONESHOT nebo MULTISHOT a kalibrujte rozsah ESC PWM.
2. BetaFlight, nastavte dshot_bitbang = ZAPNUTO při použití X6 a X8 DSHOT.
3. BetaFlight, Název cíle byl přejmenován na MatekF405TE_SD
4. ArduPilot, nastavte LOG_BACKEND_TYPE = 1 (Soubor) pro záznam na SD kartu
Specifikace
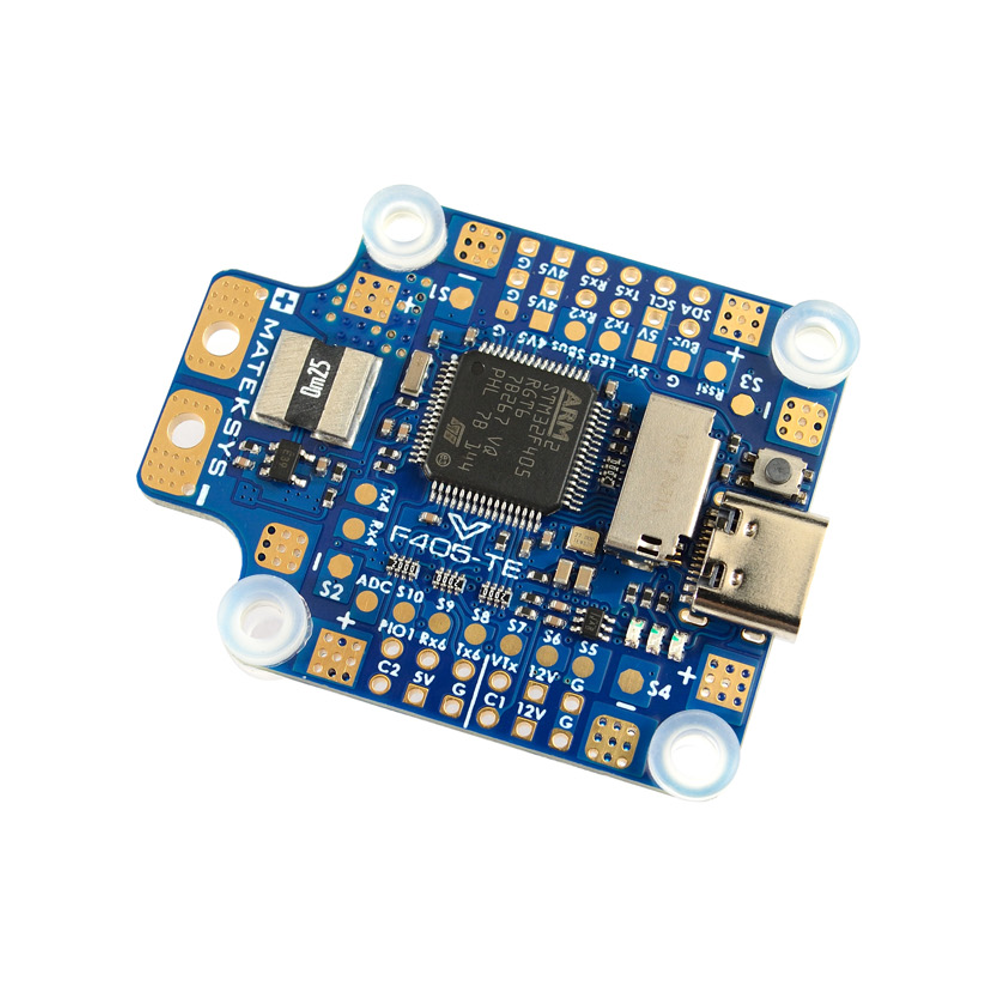
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: Slot MicroSD (SPI)
6x UART, 1x možnost Softserial_Tx (INAV/BF)
11x výstupy PWM (8x kompatibilní s Dshot pro BF/ArduPilot)
1x I2C
4x ADC (VBAT, Proud, RSSI, Rychlost Vzduchu)
1x náhradní PINIO
4x individuální podložky pro napájení/signál ESC
1x skupina G/S1/S2/S3/S4 pádů pro 4in1 signál/GND ESC
Vestavěný měnič na UART2-RX pro vstup SBUS
Přepínatelný dvojitý vstup kamery
PDB specifikace
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Max.4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Aktuální senzor: 220A, 3,3V ADC (INAV/BF měřítko 150, ArduPilot 66,7 A/V)
Dělič napětí baterie 1K:20K (INAV měřítko 2100, BF měřítko 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Fyzický
Montáž: 30,5 x 30,5 mm, Φ4 mm s kroužky Φ3 mm
Rozměry: 36 x 46 mm
Váha: 10g
Včetně
1x F405-TE
6x křemíkové gufera M4 na M3
1x Rubycon ZLH 35V/470uF (Nízký ESR)
Rozložení a zapojení

Mapování INAV/BF
Mapování ArduPilotu
Frsky Smartport Telemetrie
neinvertovaný (narušený) signál S.Portu
jakýkoli náhradní Uart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 nebo 10 (pro yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYP = 3
SERIAL4_PROTOCOL = 33
MSP_MOŽNOSTI = 0 (režim hlasování)
Relé(PINIO)
PINIO1, Konektor PIO1, Výchozí nízká úroveď
PINIO2, Přepínač kamery, C1 ZAPNUTO jako výchozí
# GPIOs
PA4 PINIO1 OUTPUT GPIO(81) NÍZKÝ //PIO1 podložka
PB5 PINIO2 OUTPUT GPIO(82) NÍZKÝ //přepínač kamery
# RCx_OPTION: Možnost vstupu RC
28 Relé Zap/Vyp
34 Relé2 Zapnuto/Vypnuto
35 Přepínač3 Zapínání/Vypínání
36 Relé4 Zapnuto/Vypnuto
např.
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relé Zap/ Vyp, Použijte kanál 7 vysílače pro ovládání PIO1 Nízká/Vysoká Úroveň
RELAY_PIN2 82 //Přepínač kamery GPIO
RC8_OPTION 34 //Relé2 Zap/Vyp, Použijte CH8 na Vysílači k ovládání vysokého/nízkého signálu na záslepce PB5
Konfigurovaná funkce se spustí, když hodnota PWM pomocného přepínače překročí 1800. Deaktivuje se, pokud hodnota klesne pod 1200.
Zkontrolujte hodnotu PWM odeslanou z vysílače při zapnutém a vypnutém přepínači pomocí obrazovky Mission Planner >> Počáteční nastavení >> Povinný hardware >> Kalibrace rádia. Pokud se nepřiblíží hodnotě 1800 nebo nesníží pod 1200, je nejlepší upravit krajní body serva na vysílači.
TIPS
- F405-TE má předinstalovaný INAV fw pro kontrolu kvality
- nastavte BLHeli32 ESC PWM frekvenci na 48 kHz nebo vyšší v programu BLHeliSuite
ArduPilot
ArduPilot fw, varování "Interní chyby 0x4000 l:213 spi_fail", prosím nastavte LOG_BACKEND_TYPE = 1 (File) pro záznamy na SD kartu. Stáhněte si ArduPilot firmware z ZDE.
INAV
S firmwarovým INAVem nemůže DSHOT pracovat na S3, S5, S7 kvůli konfliktu DMA, prosím použijte místo toho ONESHOT nebo MULTISHOT a kalibrujte rozsah ESC PWM.
Stáhněte si firmwaru INAV 4.1.x z webu Matck. INAV5.x nebo novější přímo ze správce INAV
BetaFlight
Pokud používáte 5V pasivní summer, napište do CLI „set beeper_frequency = 2500“.
Cíl MATEKF405TE_SD byl podporován od BF4.4.
Nastavte dshot_bitbang = ON při použití X6 a X8 DSHOT.
BF 4.3 si můžete stáhnout přímo z konfigurátoru BF, BF 4.2.x z Zde.
Barometer SPL06-001 není podporován Betaflight.